

Jean-François, radioamateur sous l’indicatif F5RRB s’est intéressé aux « GPS Mouse » qui ressemblent à nos souris filaires. Il avait pour but d’apprendre comment utiliser ces matériels très souvent mis en œuvre par les radioamateurs, souvent couplés à des systèmes APRS. Il a développé un logiciel qui tourne sous Windows et qui enregistre un trajet, tout en fournissant un tas d’informations intéressantes. Je lui laisse la parole.
Au sommaire :
Utiliser un GPS mouse – Coordonnées, QRA Locator, trajet…
Bonjour,
il y a quelques mois François MOCQ F1GYT (Framboise314) vous a présenté le relais radioamateur APRS à base de Raspberry-pi installé par Roland F6GDL au Mont-Saint-Vincent (dep 71) :
https://www.framboise314.fr/un-relais-aprs-f1zyg-3-equipe-dun-raspberry-pi-au-mont-saint-vincent-71/
Ceci m’a amené à analyser de plus près les modules GPS « mouse » magnétiques que nous posons sur le toit de nos véhicules et qui récupèrent des satellites les informations de localisation transmises ensuite par nos émetteurs radioamateurs, je suis très heureux de vous proposer le résultat de ce travail.
Quelques GPS utilisés pour cet article
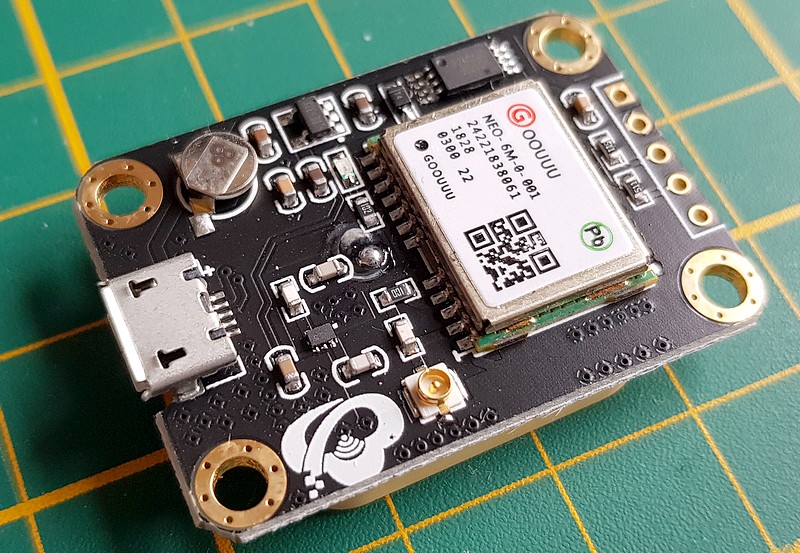



Mon objectif : apprendre en développant et proposer un logiciel d’affichage sur PC des données GPS différent de ce qu’on trouve d’habitude, j’ai alors ressorti du placard un vieux modèle GPS HOLUX pour le qualifier ; j’ai aussi acheté le modèle récent suivant qui fonctionne très bien :
https://www.ebay.com/itm/203101316070
Avec ce logiciel que j’ai développé vous pourrez vous aussi tester vos GPS type « mouse » d’une façon très simple : seulement deux fichiers (un .bat et un .exe) à recopier sur votre PC, double click sur le fichier .bat et c’est parti.
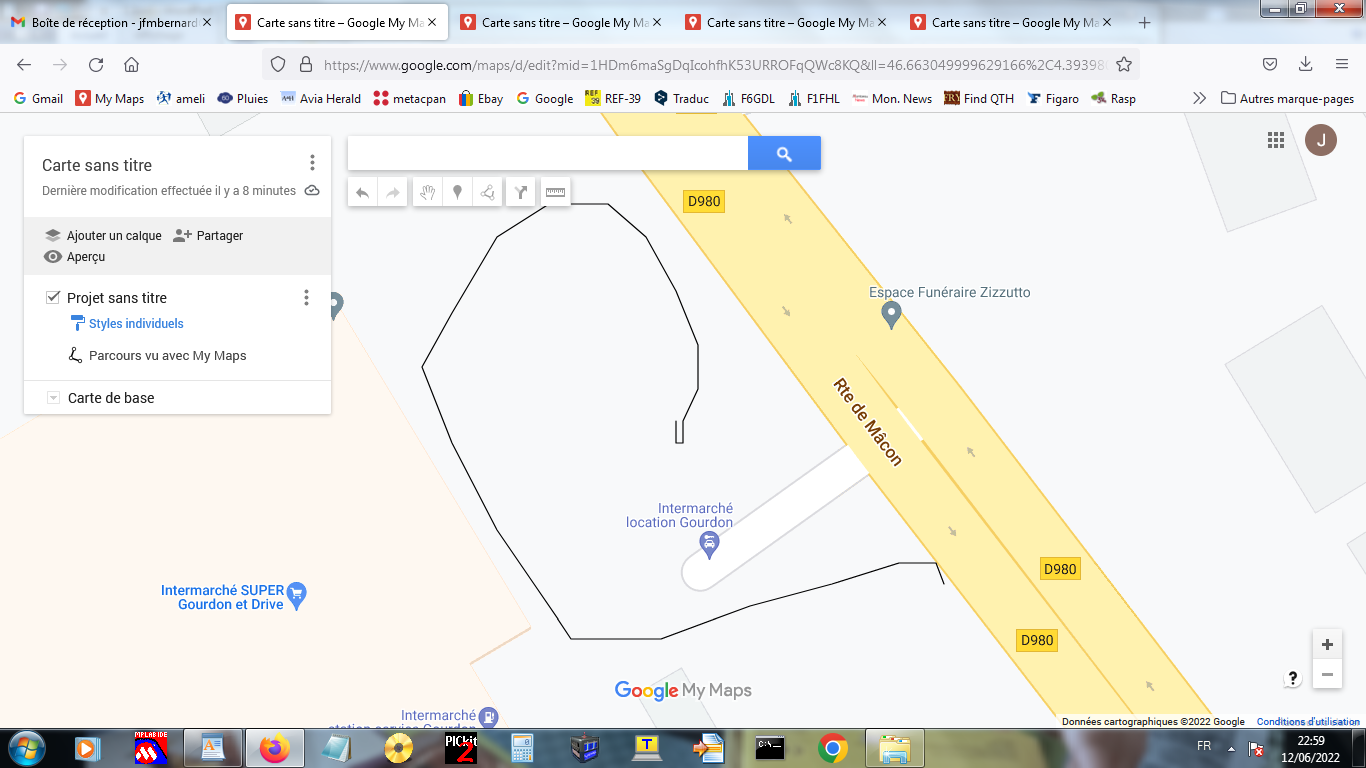
Vous pourrez aussi ensuite visualiser vos trajets avec Google Maps grâce au fichier .kml qui est construit au fil de l’eau par ce programme, ce point pourra paraître futile face aux applications toutes prêtes sur les smartphones, mais pourquoi me passer de vous l’offrir aussi ?
Ce logiciel sans prétention est atypique sur le site de Framboise 314 : il fonctionne sous Windows (testé sur Windows 7 et Windows 10), je l’ai développé en langage Strawberry Perl, voici des sujets pratiquement jamais évoqués sur ce site , merci à toi François de mettre ce travail à disposition de tes lecteurs et bravo pour ton ouverture d’esprit !
Les caractéristiques de mon programme
- Présentation en Français ;
- Détection automatique du n° de port com et de sa vitesse sur lequel est raccordé le GPS « mouse », que ce soit par prise série DB9 (vieux modèles) ou prise USB ;
- Les mesures sont enregistrées au fil de l’eau dans un fichier .csv situé dans le même répertoire que les fichiers .bat et .exe et dont le nom indique le n° de port com concerné. Si le fichier n’existe pas encore il est créé au lancement du programme, sinon les données sont ajoutées à la fin du précédent enregistrement.
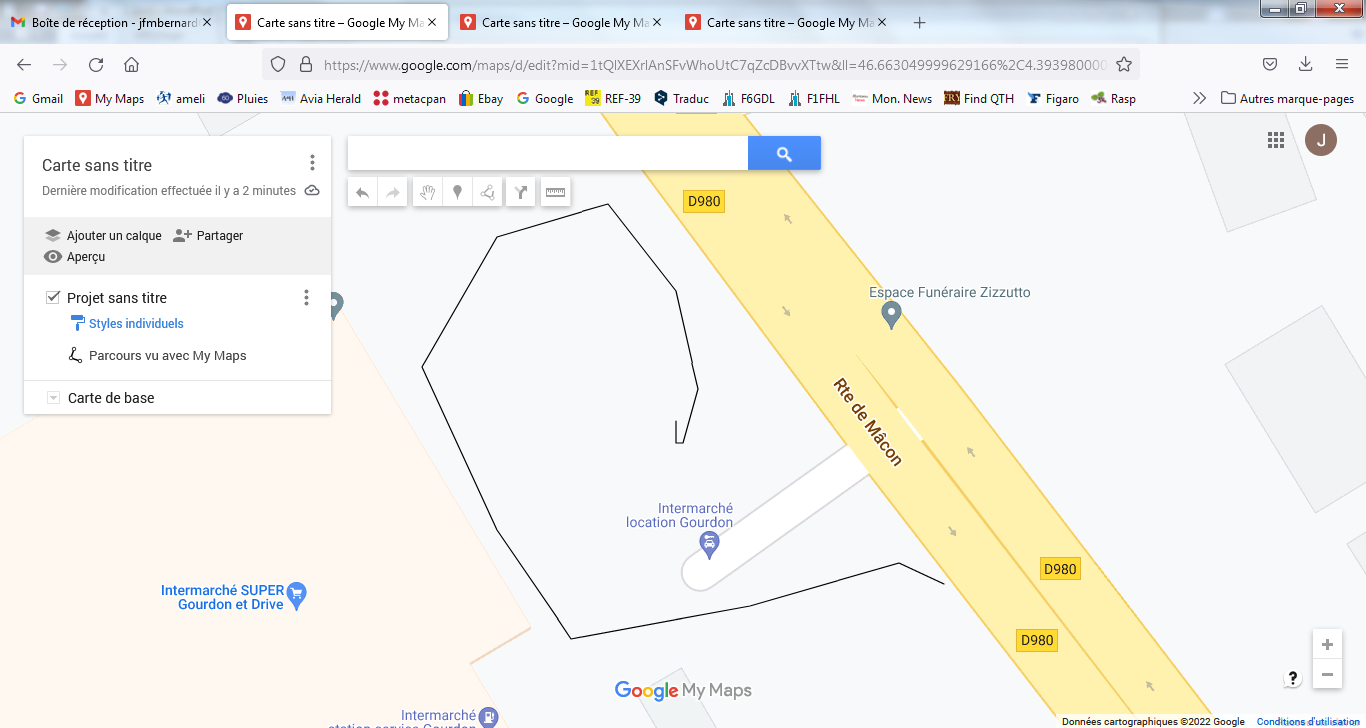
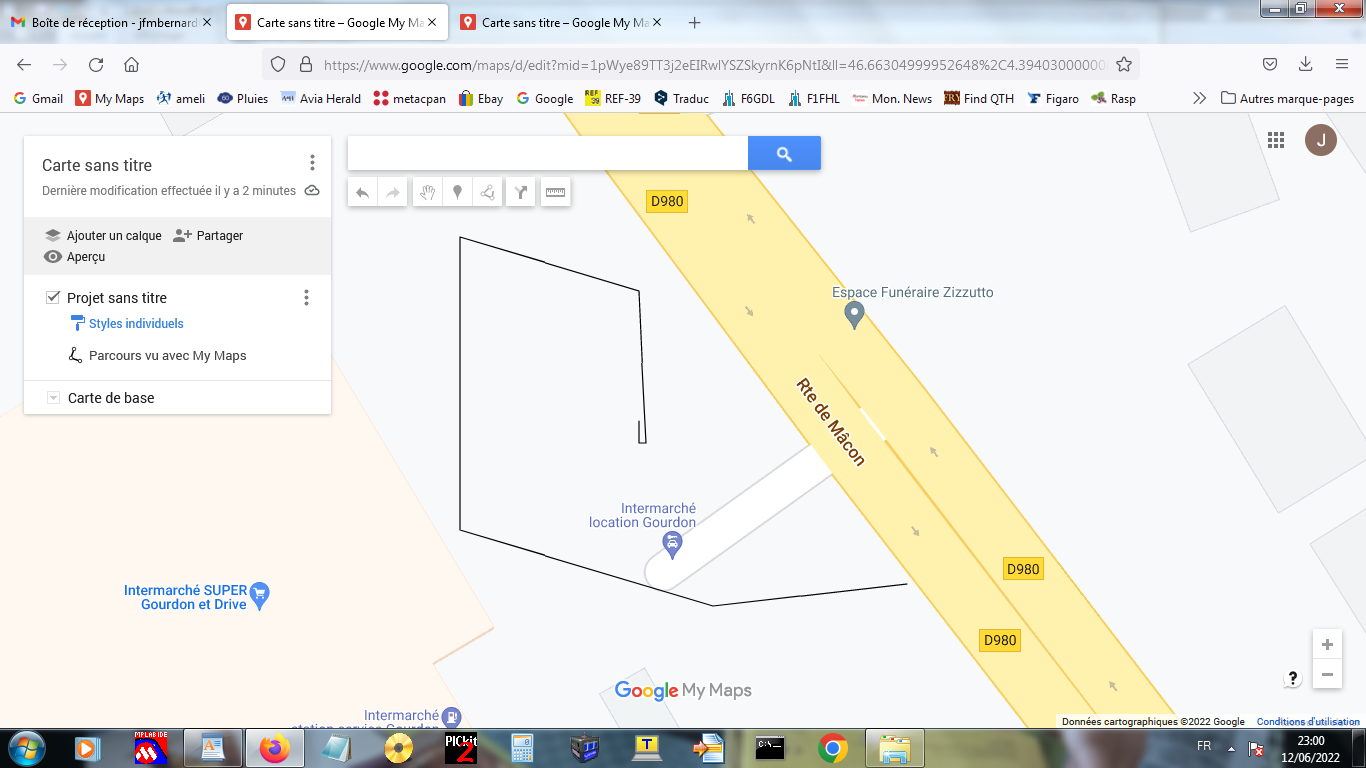
- De la même façon un fichier .kml est aussi créé au fil de l’eau qui permet ensuite de voir tout son trajet avec Google Maps en allant sur https://mymaps.google.com puis faire : +CREER UNE CARTE -> Importer -> Sélectionner un fichier sur votre appareil -> choisir sur votre PC le nom de fichier .kml
Nb : une fois le fichier .kml créé les spécialistes pourront l’éditer et en modifier l’entête afin de personnifier à leur convenance.
- Un fichier .tmp est aussi créé mais il n’a pas d’utilité pour l’utilisateur, seulement pour le déroulement de ce programme
- Pour enregistrer un nouveau trajet il faut effacer et/ou sauvegarder les trois fichiers préalables .csv, .tmp et .kml
- Affichage de la hauteur (je n’appelle pas cela altitude car la justesse de mesure n’est pas toujours au rendez-vous) ;
- Affichage de la hauteur min et max atteintes depuis le lancement du programme ;
- Affichage du CAP en degré (certains vieux GPS fournissent une valeur même si le GPS n’est pas en mouvement, c’est pourquoi je ne la prend pas en compte dans mon programme si la vitesse = 0 km/h) ;
- Affichage de la vitesse en km/h si le GPS la fournit car ce n’est pas toujours le cas sur les vieux modèles (présence ou pas de la trame $xyVTG) ;
- Affichage de la vitesse max atteinte depuis le lancement du programme ;
- Affichage HDOP (indicateur précision horizontale) ;
- Affichage HDOP moindre et meilleur atteint depuis le lancement du programme ;
- Affichage du nombre de satellites reçus ;
- Affichage du nombre de satellites min et max atteint depuis le lancement du programme ;
- Affichage du locator étendu sur dix caractères (souvent utilisé par les radioamateurs car cela indique de façon simple une zone en France métropolitaine de l’ordre de la taille d’une grosse maison), très pratique à visualiser avec le site internet suivant du radioamateur Américain K7FRY :
https://k7fry.com/grid/?fbclid=IwAR3iUqCBUgCCWiv_QyV_eWUhJ80-AsGxATP2q7KMo-sq4QViVeEMl8-fBnQ - Affichage longitude et latitude exprimées sous trois formes : DD (Degrés en décimales), DMS (Degrés – Minutes – Secondes et 1/10 ème de seconde), DMD (Degrés – Minutes en décimales), un excellent site internet sur ce sujet est le suivant :
https://www.guide-plaisance-mobile.fr/convertisseur-de-coordonnees-gps-degres-minutes-secondes-decimales - Mesures avec rafraîchissement de l’écran toutes les 2 secondes ou 3 secondes selon le modèle de GPS détecté ;
- Affichage date et heure « UTC » fournis par les satellites (« UTC » entre guillemets pour les puristes) ;
- Compatible trames NMEA $GP, $GN (testées) ; $GA et $BD (non testées encore car je n’avais pas de GPS adéquat) ;
- Affichage en surligné jaune des valeurs actualisées ;
- Pour l’utilisateur quand le GPS est connecté au PC il faut juste vérifier dans le gestionnaire de périphérique que le port com est trouvé et a bien un numéro, au pire installer le logiciel pour avoir un port com virtuel puis lancer le fichier .bat ;
- Il faut recevoir au moins quatre satellites pour que le programme affiche des données ;
- Au démarrage si le point n’est pas calé il faut patienter car la réception est effective mais dégradée.
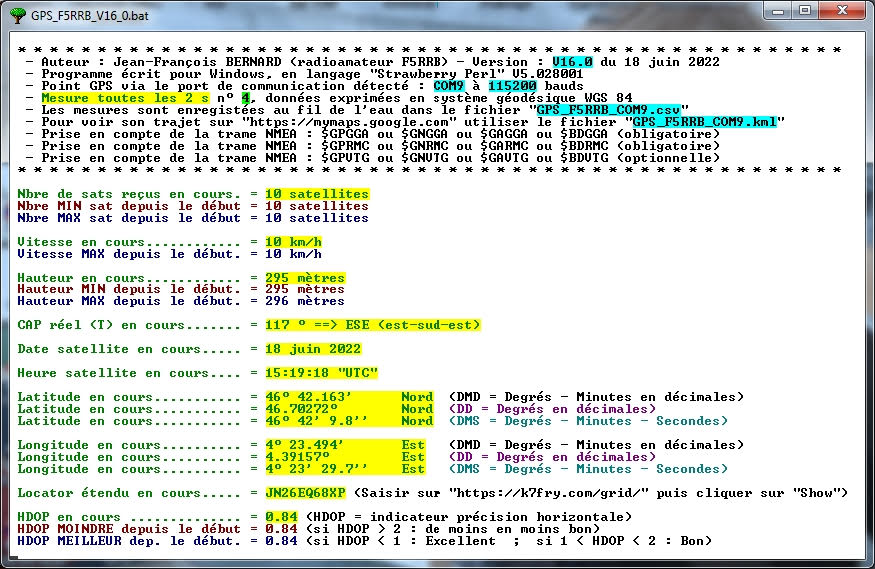
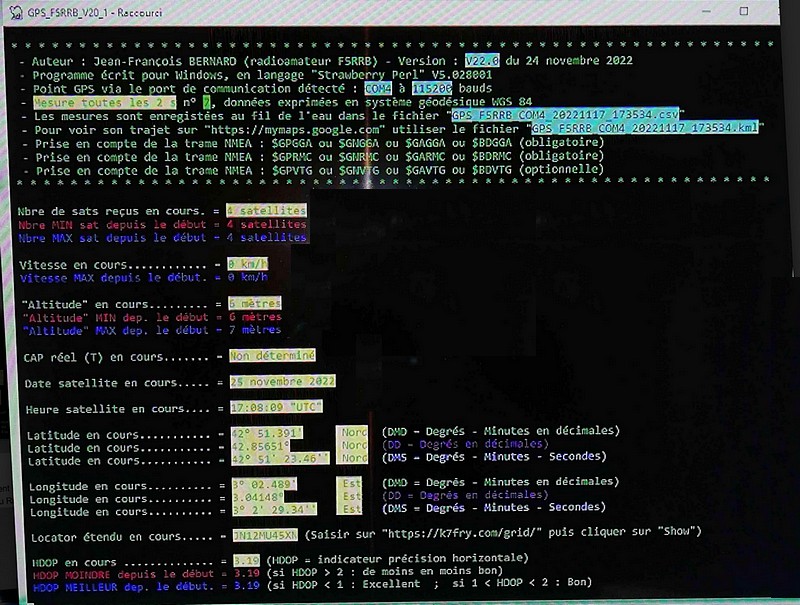
Exemple d’écran fourni par le programme
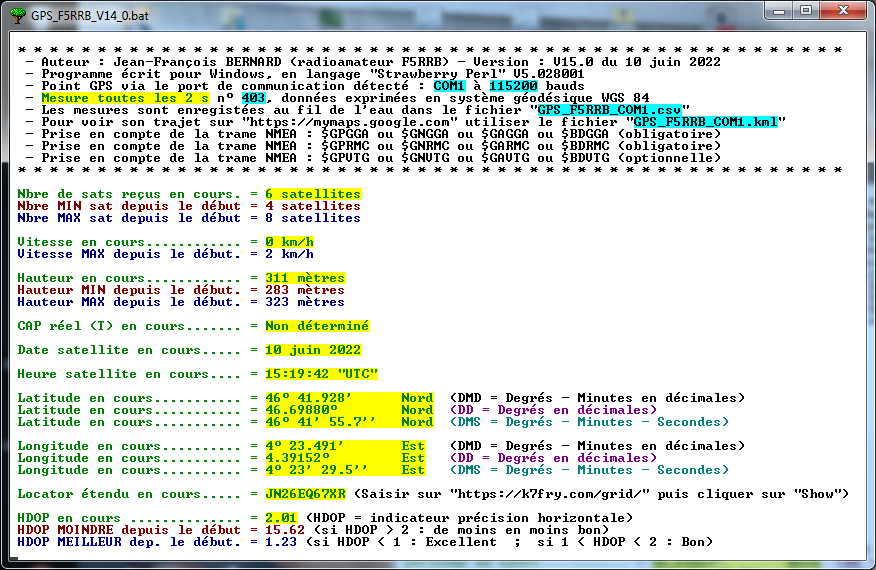 Lorsque le programme a reçu les données GPS il affiche cette fenêtre. La mise en route peut prendre un certain temps car le programme teste tous les ports à plusieurs vitesses. Certains anciens GPS sortent du 4800, et en fonction de la machine le port peut changer. Il faut donc tester…
Lorsque le programme a reçu les données GPS il affiche cette fenêtre. La mise en route peut prendre un certain temps car le programme teste tous les ports à plusieurs vitesses. Certains anciens GPS sortent du 4800, et en fonction de la machine le port peut changer. Il faut donc tester…

Cliquer pour agrandir
Sur la carte de K7FRY on voit que le Locator étendu donne une précision intéressante avec seulement 10 chiffres et lettres.
Éventuellement si le programme ne trouve pas le GPS, il faudra peut-être installer un driver (fourni ou pas avec le GPS). Les modèle uBlox fonctionnent souvent sans installation, certains nécessitent un driver. Vous pouvez essayer celui-ci qui a fonctionné dans un cas… ou cet autre de uBlox.
Intervalle de mesure
Mesure toutes les 2 secondes
Mesure toutes les 4 secondes
Mesure toutes les 8 secondes
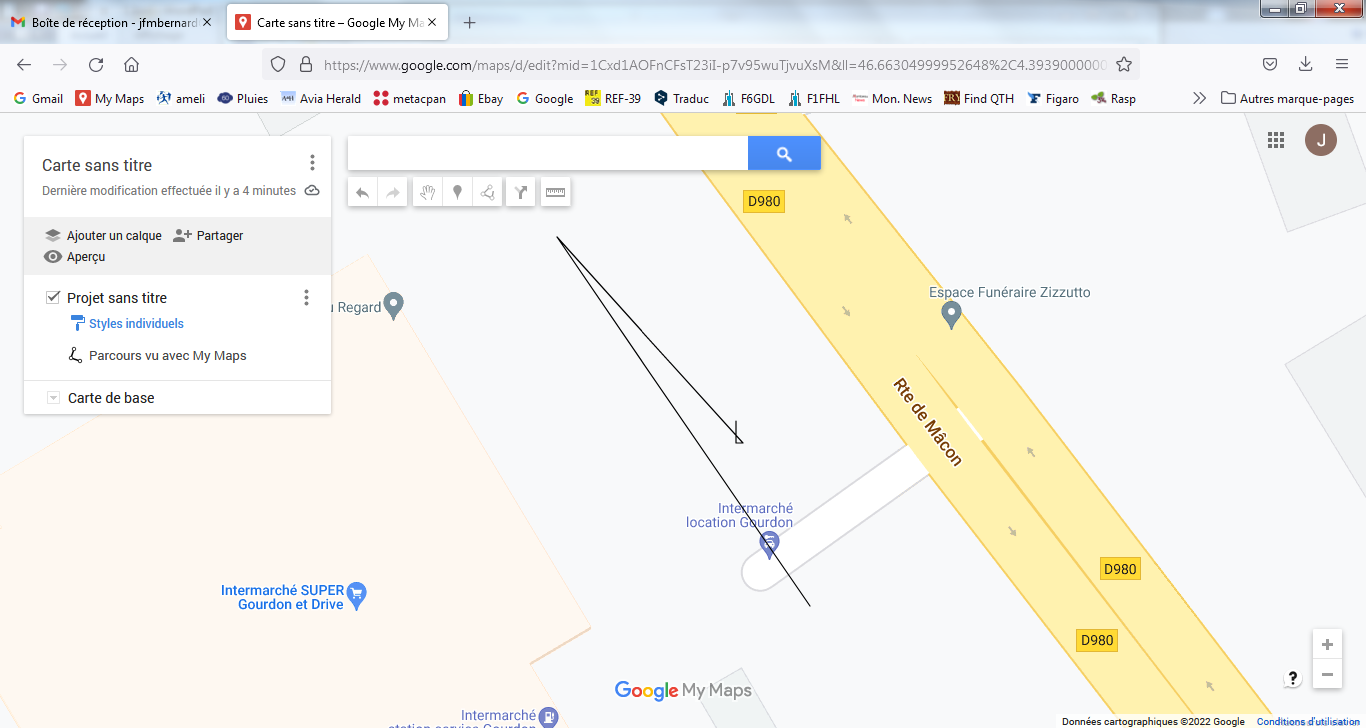
Mesure toutes les 16 secondes
L’intervalle auquel les données sont enregistrées dans le fichier .CSV ou .KML dépendent du modèle de GPS utilisé : le programme enregistre les données toutes les 2 s pour les GPS « récents » et toutes les 3 s environ pour les plus vieux modèles. Pour comparaison, une montre GPS Garmin enregistre les données toutes les 15 secondes lors d’une marche.
Sur les images ci dessus avec des données captées en voiture, on voit que le rendu est meilleur pour un intervalle de 2 secondes entre mesures.
Conclusion
Si votre GPS est placé en intérieur restez prudents sur l’interprétation des données fournies, surtout si le HDOP se dégrade.
Un immense merci à François F1GYT, Roland F6GDL, Alain F5RUL et Bernard F4GCZ, fidèles passionnés et très patients !
==> Lecteurs de Framboise314, vous me ferez un grand plaisir en me tenant informé de vos essais par mail : jfmbernard@gmail.com
Cordialement à tous,
Jean-François BERNARD – F5RRB
Note de framboise314 : Jean-François devrait s’atteler à une version sur Raspberry Pi prochainement 😉
Téléchargement (Les versions les plus récentes sont en bas de l’article)
Le programme en v15 est disponible en cliquant sur ce lien.
Les prochaines versions seront ci-dessous.
==================== UPDATE du 19 juin 2022 – v16 ====================
 Télécharger la v16 : Cliquer sur ce lien
Télécharger la v16 : Cliquer sur ce lien
- Le CAP sera maintenant toujours donné sur trois chiffres
- Ajout en plus selon le CAP de seize directions possibles : (N, NNE, NE, ENE, E, ESE, SE, SSE, S, SSO, SO, OSO, O, ONO, NO et NNO)
- Ajout bulle « Départ » dans le fichier .kml
==================== UPDATE du 24 juin 2022 – v17 ====================
J’ai juste changé le mot hauteur par « altitude » en mettant toutefois le mot altitude entre guillemets.
En effet, un ami qui pilote des avions à Pouilloux m’a fait la remarque judicieuse suivante que j’ai prise en compte pour cette nouvelle version :
« Une petite précision sémantique au sujet de la différence entre altitude et hauteur. En aéronautique l’altitude désigne la hauteur par rapport au niveau de la mer et la hauteur désigne celle par rapport au sol. »
Télécharger la v17 : Cliquer sur ce lien
==================== UPDATE du 12 juillet 2022 – v18 ====================
J’ai corrigé un bug qui arrivait rarement dans mon programme sur l’affichage en DMS uniquement de la latitude et de la longitude, il n’y avait pas de soucis pour le fichier .kml.
Télécharger la v18 : Cliquer sur ce lien
==================== UPDATE du 1er août 2022 – v19 ====================
J’ai tenu compte des remarques des utilisateurs : j’ai ajouté la possibilité d’indexation des fichiers de traçabilité avec en suffixe la date et l’heure
Pour cela au démarrage du logiciel j’ai rajouté un texte en jaune sur fond rouge avec la possibilité d’appuyer sur la touche « m » avant 6 secondes afin de garder la traçabilité toujours avec les mêmes fichiers. Pour ceux qui désirent avoir l’indexation des fichiers de traçabilité il suffit de ne rien faire ou d’appuyer sur une autre touche que « m » pour écourter la tempo.
Télécharger la v19 : Cliquer sur ce lien
==================== UPDATE du 10 octobre 2022 – v20 ====================
Correction d’un bug.
Télécharger la v20 : Cliquer sur ce lien
==================== UPDATE du 24 novembre 2022 – v21.0 ====================
Dans le cas d’une utilisation sur une télévision on ne voyait pas certains textes, c’est corrigé.
Télécharger la v21.0 : Cliquer sur ce lien
==================== UPDATE du 27 novembre 2022 – v22.0 ====================
Correction d’affichage des couleurs avec un Raspberry… et testé cette fois en vrai
Pour le suffixe d’extension des fichiers de traçabilité .csv et .kml je récupère maintenant les données GPS car avant je prenais la date et heure du PC mais avec un Raspberry ça fonctionnait mal.
Voici ce que cela donne avec un Raspberry et une télévision
Télécharger la v22.0 : Cliquer sur ce lien
==================== UPDATE du 24 décembre 2022 – v23.0 ====================
Ajout d’une ligne qui affiche en permanence la distance à vol d’oiseau entre le moment présent et le début du parcours (donc la ligne 2 du fichier .csv), cette nouvelle information est reportée en colonne Q du fichier .csv.
Télécharger la v23.0 : Cliquer sur ce lien
==================== UPDATE du 2 janvier 2023 – v24.0 ====================
Le programme v23 ne fonctionnait que pour le mois de décembre, c’est corrigé avec la V24.0
Télécharger la v24.0 : Cliquer sur ce lien
==================== UPDATE du 12 avril 2023 – v25.0 ====================
Le tracé Google Maps avec le fichier .kml se fait maintenant en ligne rouge, mieux visible qu’avant. D’après des travaux de Daniel F6FTC.
Télécharger la v25.0 : Cliquer sur ce lien
==================== UPDATE du 27 juin 2023 – v26.0 ====================
Amélioration de la fenêtre du logiciel, réduction du nombre de ligne affichées
Télécharger la v26.0 : Cliquer sur ce lien
Sources
https://www.earthpoint.us/exceltokml.aspx
https://www.sigterritoires.fr/index.php/kml-pour-bien-commencer/
Hello,
J’ai encore un vieux GPS qui traine du temps des PPC !
Ce serait intéressant de tester.
Un Leadtek Wireless GPS Receiver LR9537
😉
Bonjour Doudy,
Cela me ferait extrêmement plaisir que vous fassiez l’essai et encore plus si cela fonctionne effectivement avec ce modèle de GPS.
Jean-François F5RRB
Hello,
Mon GPS est Bluetooth
J’a une clé Bluetooth Trust BT180
Mais je n’arrive pas à appairer les deux !
Donc ton logiciel ne trouve pas le bon port!
😥
J’ai encore un GPS plus ancien mais avec une fiche spéciale qui ne se connecte pas à un pc !
Désolé
Le GPS en question

Mon programme ne peut reconnaitre que les ports COMx (ceux qu’ont voit avec le gestionnaire de périphériques de Windows), que ce soient de vrais ports séries ou des ports séries USB mais vu en port COM virtuels. Pour les ports Blueetooth j’ai effectivement peur que ce ne puisse fonctionner. Reste à chercher dans le fond des tiroirs pour trouver un gps « mouse » mieux adapté ou en commander un nouveau.
Cordialement,
Jean-François BERNARD – F5RRB
L’installation de logiciel semble bien facile … merci pour le partage.
Bonjour Micrometres,
Oui deux fichiers seulement : un .bat et un .exe, on lance le bat et cela se débrouille seul… si le GPS « mouse » est bien vu en port COM dans le gestionnaire de périphériques.
Dans l’esprit j’ai voulu faire du mode « KISS » (Keep It Simple Stupid) pour que ce soit le plus simple possible pour les utilisateurs.
Prenez la version V16.0 que François a mis sur son site hier
Cordialement,
Jean-François BERNARD
Merci Jean François
J’ai fais le test de la version 17 ce matin ça fonctionne très très bien merci de m’avoir sorti mon GPS des cartons.
Je pense que beaucoup d’autre encore traine dans des cartons.
Avec les infos que tu donne beaucoup peuvent en trouver une utilité.
Il te reste a faire fonctionner ton soft sur raspbery
Bernard F4GCZ
merci Bernard
effectivement je pense que le portage sur le Pi
sera un +
73’s
François
J’espère que l’hiver sera long pour que je puisse tenter cette aventure de portage sur Raspberry…
JF F5RRB
Merci Bernard d’avoir mis tes talents au service des amateurs et passé beaucoup de temps à réaliser ce logiciel qui fonctionne à merveille…
Il m’a permis également, grâce à ta détection de ports com de me rendre compte que j’avais un problème sur un des com pour tout autre chose. Le tracé est particulièrement précis lorsque l’on décode le fichier kml avec « my maps » de Google.
J’ai utilisé plusieurs gps anciens un peu longs à se synchroniser, mais vu le coût de celui que tu préconise, je pense que pour le prix d’un paquet de cigarettes…
Comme le signale Bernard Clerc, le top sera d’utiliser un raspberry, plus facile à utiliser pour le déplacement.
Rêvons un peu!
Incrémenter les trois fichiers avec le même indice à chaque redémarrage et pourquoi pas transférer ces fichiers sur la carte sd du raspberry. Révons toujours, mais te connaissant..
Merci encore Alain F5RUL
Bonjour,
J’ai téléchargé votre logiciel pour le tester.
Hélas je ne travaille qu’en Linux et il n’y a pas les sources.
J’ai cru comprendre au QSO de ce matin que le développement a été fait en Python.
Pensez-vous porte cette application en Linux et notamment sur Raspberry PI ?
Merci pour votre réponse.
Olivier JANIN – SWL F-13459 (Écouteur régulier du R6 entre autres)
Bonjour Olivier,
Merci pour l’intérêt que vous portez à ce logiciel.
Non, le développement n’a pas été fait en Python mais en langage Perl pour Windows appelé « Strawberry Perl ». J’ai fait dans un premier temps avec ce que je connaissais le mieux.
J’ai travaillé sous linux il y a bien longtemps et ne n’ai jamais développé sur Raspberry. J’essaierai de porter ce logiciel sur Raspberry cet automne/hiver quand j’aurai du temps, cet été j’ai trop de choses à faire à l’extérieur.
Vous trouverez bien j’espère un PC Windows pour faire un essai, c’est très simple : lancer le fichier .bat et c’est tout !
Si cela fonctionne mettez un message s.v.p qui m’apportera beaucoup de joie avec le modèle du GPS « mouse » utilisé.
De mon côté je fais tourner le logiciel sur mon PC portable dans ma voiture et ensuite avec le fichier .kml je vois mon parcours avec Google Maps, c’est très détaillé.
J’aime bien la notion du locator étendu que les radioamateurs n’utilise pas assez à mon avis, c’est très simple et très pratique à utiliser.
Avec le fichier .csv vous aurez toutes les mesures enregistrées
A chaque nouveau parcours pensez à renommer les fichiers .csv et .kml afin d’en créer des nouveaux.
73’s QRO
Jean-François BERNARD F5RRB
Bonjour Jean-François,
Merci pour le coucou lors du QSO de ce matin.
Merci pour les informations, pas de problème pour le langage de programmation PERL.
Je ne manquerai pas de faire un retour dès que j’aurai mis la main sur un PC Windows.
73’s QRO.
Olivier JANIN – SWL F-13459 (Écouteur régulier du R6 entre autres)
Bonjour Olivier,
Merci d’avance pour vos retours quand vous aurez pu faire un essai.
Cela incitera j’espère d’autres personnes à en faire aussi.
Bon dimanche,
Jean-François BERNARD F5RRB
Bonjour,
J’ai trouvé un PC portable pour faire l’essai avec un GPS G-Mouse.
Le programme fonctionne parfaitement avec une très bonne précision.
Merci pour le travail.
Je ferai une petite remarque pour améliorer encore le produit en nommant les fichiers avec la date ‘t l’heure de début ce qui permettrait de ne pas écraser les mesures précédentes (ex : GPS_F5RRB_COM3_20220709_1506).
L’usage que je souhaite en faire serait de fixer le PC portable dans le coffre du véhicule et de lancer en automatique (c’est déjà le cas) l’application à chaque démarrage et je récupérerai les fichiers avec un Raspberry en réseau.
Il me reste un soucis à régler, quand les mesures sont en cours j’ai des QRN qui montent jusqu’à un signal de 3.
A voir pour filtrer tout ça.
En résumé, excellent travail et programme de très bonne qualité que je recommande.
Mes meilleurs 73’s.
Olivier JANIN – SWL F-13459 (Écouteur régulier du R6 entre autres)
Bonjour Olivier,
Merci pour ces informations, je suis ravi que mon programme vous plaise.
Quand les fichiers .csv et .kml existent déjà ils ne sont pas écrasés au lancement du programme, les nouvelles informations sont simplement mises à la suite. C’est pratique par exemple si le GPS se débranche en roulant, il suffit de le rebrancher et relancer le programme et les fichiers seront presque complets. De mon côté à chaque fin d’un nouveau parcours je renomme et j’archive les deux fichiers .csv et .kml, j’efface aussi le fichier .tmp, ainsi au prochain lancement du programme on repart à zéro.
Avec mes meilleures 73’s
Jean-François BERNARD F5RRB
Bonjour à tous,
A partir du 12 juillet 2022 pensez à télécharger la nouvelle version V18.0 que François Mocq a eu la gentillesse de mettre à disposition.
Jean-François BERNARD – F5RRB
Bonjour à tous,
A partir du 1er août 2022 pensez à télécharger la nouvelle version V19.0 que François Mocq a encore eu la gentillesse de mettre à disposition sur son site.
J’ai ajouté par défaut un suffixe avec la date et l’heure à chaque lancement du logiciel pour le nom du fichier .csv et du fichier .kml, ceci était demandé par Alain F5RUL et M. Olivier JANIN.
On peut aussi garder comme avant toujours les mêmes noms de fichier en appuyant sur la touche « m » au démarrage quand un message apparait.
Bons essais et merci de mettre un petit message si vous êtes satisfaits (ou pas !)
Jean-François BERNARD – F5RRB
Bonjour,
Nouvelle version V20.1 au 10 octobre 2022 : merci à Etienne F6AUC qui m’a permis de corriger un bug pour ceux qui se situent à l’ouest du méridien de Greenwich.
Merci aussi à François Mocq F1GYT pour la mise à disposition à tous de cette version sur son site internet.
Jean-François BERNARD – F5RRB
jfmbernard@gmail.com
Bonjour à tous,
Oui, je confirme que le programme fonctionne très bien sur Windows 11, la version sur Raspberry sera la bienvenue également.
Etienne Ostiz – F6AUC.
Ping : Tachymètre précis avec un PIC16F628A par F5RRB, Jean-François - Framboise 314, le Raspberry Pi à la sauce française....