
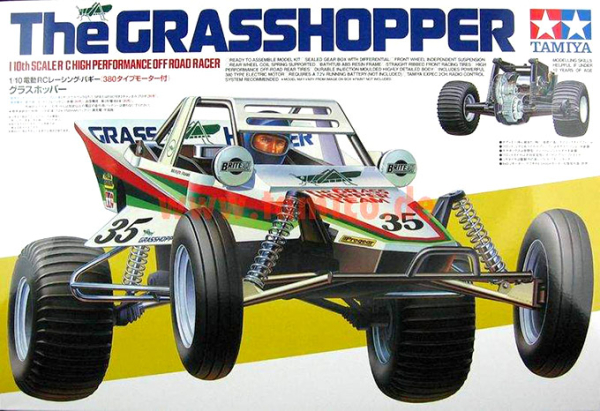
 C’est une Grasshopper II de Tamiya, voiture radiocommandée mythique des années 90, que Benoit a choisie pour l’équiper d’un Raspberry Pi.
C’est une Grasshopper II de Tamiya, voiture radiocommandée mythique des années 90, que Benoit a choisie pour l’équiper d’un Raspberry Pi.
Il a décrit sur son blog la réalisation de cette modification. Ceci pourra vous permettre de démarrer si vous avez un projet identique.
Il a choisi un Rasberry Pi B+ pour équiper ce bolide vintage.
L’objectif de Benoit était de réaliser le projet en utilisant un minimum de matériel.
Matériel utilisé :
- Raspberry Pi model B + une carte SD ( 2GB minimum )
- 2 servomoteurs (mais vous pouvez éventuellement réutiliser les servos d’origine)
- Un régulateur de tension ( Alim du Raspi avec l’accu du véhicule)
- Clé USB WiFi
- Camera pour Raspberry Pi ou camera USB supportant nativement le M-JPEG.
Note de framboise314 : un modèle de clé Wi-Fi avec antenne aura une portée supérieure. 
Le bloc batterie de la Grasshopper fournit 7,2 volts il fallait donc ramener cette tension à 5 volts pour alimenter le Raspberry Pi et les servos.

Le choix de Benoit s’est porté sur le TSR 1-2450 de TRACOPOWER qui a le même brochage que la série 78xx. Alors que les 7805 dissipent la puissance sous forme de chaleur (et en ce moment on n’en a pas vraiment besoin 😉 ) le TSR 1-2450 est un régulateur à découpage qui affiche un rendement de 96%. De plus sa tension de sortie très stable ne fait courir aucun risque au Raspberry Pi (surtension, plantage…).
Après un rappel des câblages de servo couramment rencontrés, Benoit rappelle le fonctionnement de ceux-ci, la largeur d’impulsion reçue provoquant la rotation de l’axe entre -90 et +90 degrés.
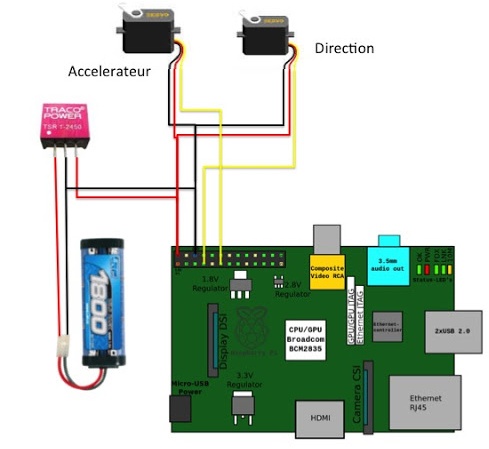
Les servos sont connectés directement aux broches du port GPIO comme ci-dessus. C’est le programme servoblaster qui est chargé de gérer les servos.
Le servo de direction est classique, le servo de commande de vitesse n’existe plus sur les modèles actuels, remplacé par un variateur électronique :
Dessin P. Boursin
Le servo déplace un curseur qui insère une résistance plus ou moins grande dans le circuit moteur, provoquant un ralentissement de celui-ci.
La télécommande
Le Raspberry Pi monté sur la voiture est équipé d’une clé USB Wi-Fi. Le Raspberry Pi est configuré en point d’accès Wi-Fi avec hostpad.
Ceci permet au smartphone utilisé en télécommande de se connecter au Raspberry Pi.
La télécommande est une appli Android développée par Benoit.
La télécommande envoie une trame texte toutes les 20mS, c’est à dire à la fréquence à laquelle ces valeurs doivent être transmises aux servos.
Un programme en C tourne sur le Raspberry Pi et est chargé de commander la rotation des servos à partir de ces informations.
La vidéo revient vers le smartphone via le Wi-Fi avec gstreamer.

Conclusion
Une réalisation qui pourra servir de base si vous souhaitez modifier une voiture RC pour l’équiper d’un Raspberry Pi.
Si l’article de Benoit manque un peu de photos de la réalisation, il contient suffisamment d’informations pour quelqu’un qui souhaite se lancer dans un projet identique.
Sources
- http://peeksetpokes.blogspot.fr/
- http://pi.gbaman.info/?p=150
- https://www.dropbox.com/s/00ybydgp0rbwn2k/Telecommande.apk
- http://sebsauvage.net/streisand.me/thomasinthesky2/?20131204_121917_Faire_de_votre_Raspberry_Pi_un_point_d_rsquo_acces_WiFi__oui_c_rsquo_est_faisable.
- http://cihatkeser.com/servo-control-with-raspberry-pi-in-5-minutes-or-less/
Pourquoi utiliser du WIFI ????
c’est galere a utiliser, il faut degainer une usine a gaz niveau soft.
J’aurai choisi du bluetooth, qui permet une connectiopn point a point sans passer par un systeme client server.
le bluetooth et le wifi travaillent sur les memes frequences et lorsqu’ils sont presents sur une carte empruntent le meme circuit hardware et donc la meme antenne disons.
Le probleme du bluetooth, c’est que la portée ne depasse pas 10m…. c’est un peu juste pour une radiocommande
Merci pour cette découverte, c’est vrai que ça fait envie 🙂
@fabrice : le bluetooth et le wifi sont équivalent en terme de distance/puissance/vitesse de transfert des données ?
En gros, le signal ne se perd pas plus vite avec le bluetooth ? On peut faire passer de la vidéo aussi facilement ?
bonjour, je suis conscient que ce n’est peut-être pas le meilleur endroit pour demander et auquel cas je m’en excuse, mais je mène un projet à peu près similaire, sauf que je ne possède pas la batterie originale du véhicule et que je compte ajouter ceci : http://www.robotshop.com/eu/fr/kit-tourelle-pan-tilt-aluminium-lynxmotion-micro-servo-noir.html .
j’ai donc investi dans un compartiment à piles pouvant délivrer une tension de 5 v, mais je ne suis pas sûr que cela suffise, et je ne sais pas comment le connecter (j’ai entendu dire que si les servos tiraient sur la tension du Rpi cela pouvait lui causer des dommages irrémédiables)
Si vous avez des suggestions je suis preneur, et soyez pas vache je débute 🙂 Merci !
la référence de mon compartiment à piles, si ça peut aider: http://imall.itead.cc/battery-holder-5xaa-square.html
Bonjour
Pas de souci sur framboise314 on ne se fait pas jeter parce que la question n’est pas au bon endroit 😉
Pour le compartiment à piles il va te délivrer 5 x 1,5 volts = 7,5 volts ! Attention de ne pas brancher les servos directement sur cette tension car ils supportent 5 volts maxi
idem pour le raspberry pi qu il ne faudra pas brancher sur cette tension directement
passe par un convertisseur DC DC pour ramener la tension à 5V !
http://www.ebay.fr/itm/SUPER-MINI-1-8A-DC-DC-BUCK-CONVERTER-MODULE-STEP-DOWN-ADJUSTABLE-EXAMPLE-12V-5V-/171464543948?pt=LH_DefaultDomain_3&hash=item27ec154ecc
par contre le pan&tilt me semble cher pour un début regarde quand même
http://www.ebay.fr/sch/i.html?_from=R40&_trksid=p2050601.m570.l1313.TR0.TRC0.H0.Xpan+tilt+servo.TRS0&_nkw=pan+tilt+servo&_sacat=0
ou encore http://www.aliexpress.com/item/Free-shipping-PT-Pan-Tilt-for-Aircraft-1pcs-FPV-dedicated-nylon-PTZ-2pcs-9G-servos-SG90/2054700242.html
ou http://www.gotronic.fr/art-support-pan-tilt-dg2b-avec-servos-12404.htm
et … n’hésite pas si tu as des questions 😉
cordialement
François
Merci beaucoup pour cette réponse rapide, alors oui j’aurais des questions:
-concernant le convertisseur DC DC, c’est un pour tout ou je dois m’en procurer un par servo + un pour le raspberry?
-vu que ça me fait déjà quatre servos à traiter, et que je compte refaire d’autres projets comme celui-ci, on m’a conseillé ce produit : http://www.amazon.fr/gp/product/B00KLBTTWS?psc=1&redirect=true&ref_=oh_aui_detailpage_o00_s00 est-ce judicieux d’après vous?
-la référence de mon châssis tant qu’à faire : http://www.robotshop.com/eu/fr/kit-robot-chenilles-multi-chassis-tank.html
Bonjour
avec un seul DC-DC ça devrait aller et j’ai oublié de répondre pour les servos : aucun problème si on les branche sur le 5v du raspi… j’ai un collègue qui surveille son poulailler 😉 comme ça et ça fonctionne très bien (ça sera décrit sur le blog un de ces jours…)
La carte PWM adafruit est très bien
pour ma part je trouve le chassis un peu cher pour un début (mais ce n est que mon avis) il y a des solutions chinoises (sans doute moins costaud) moins chère pour commencer…
http://www.ebay.fr/sch/i.html?_from=R40&_trksid=p2050601.m570.l1313.TR0.TRC0.H0.TRS0&_nkw=Tracked+Robot+Kit+Multi-Chassis&_sacat=0
il vaut mieux bien réfléchir à ce que tu veux faire et ce qui est important pour toi. Si c’est de faire un robot très costaud qui passe partout ou apprendre à programmer un robot qui va rester dans une pièce ou sur une table ?
Si tu veux présenter ton projet une fois fini sur Framboise314, les pages te sont ouvertes 😉
Cordialement
François
Bonjour
et merci encore de porter de l’intérêt à mon projet, je ne manquerais pas de vous faire parvenir des photos/vidéos de l’avancement 🙂
Mon but est effectivement de construire un rover le plus costaud et évolutif possible, j’ai des projets pour lui, qui suivront après celui-ci .
Je peux brancher TOUS mes moteurs sur le 5v du raspberry pi sansle convertisseur donc, si j’ai bien compris? Ou juste un? ( j’ai deux 5v pour la tourelle et deux 4,5v pour le châssis si je ne m’abuse)
Et si vous y avez compris quelque chose, j’aimerais que vous m’expliquiez le rôle de la puce adafruit, je ne suis pas sûr d’avoir bien compris à quoi elle sert …
Merci encore de m’apporter cette aide, qui m’est indispensable pour avancer dans ce milieu qui est nouveau pour moi (j’adore la robotique, mais je n’y connais rien, à la base je fais des jeux vidéo)
Pour le DC DC, je peux prendre celui-ci ? http://www.ebay.fr/itm/2A-DC-DC-12V-5V-Step-Down-Buck-Power-Module-Adjustable-Analog-LM2596-LM2576-B32/321759592153?_trksid=p2047675.c100005.m1851&_trkparms=aid%3D222007%26algo%3DSIC.MBE%26ao%3D1%26asc%3D20140620091323%26meid%3D0de4522294bb4c97b861c30c86b0250f%26pid%3D100005%26rk%3D3%26rkt%3D5%26sd%3D171464543948 il me convient mieux pour la rapidité de livraison, et les spécifications m’ont l’air sensiblement les mêmes.
Et vous êtes absolument sûr que je peux connecter un ou plusieurs moteurs sur le 5V ?
Partout ailleurs, il m’a été fortement déconseillé de brancher un moteur, peu importe la taille ou la conso, directement sur le raspberry pi, sous peine de l’endommager … Obligatoirement passer par une alim externe.
Bonjour
oui pour le DC DC c est bon. Par contre nous avions parlé des servos connectés sur le Raspberry Pi
S’il s’agit des moteurs de propulsion c’est une autre histoire ! Effectivement des moteurs DC génèrent des parasites importants dus au collecteur et il vaut mieux éviter de les brancher sur la même alim que le RasPi sous peine de plantage voir… pire !
De même les sorties GPIO sont limitées en courant et ne pourront pas piloter un moteur en direct, il faudra passer par une carte d’adaptation. J’en parle dans mon bouquin ou je décris la commande d’un moteur DC avec le GPIO en PWM pour gérer la vitesse de rotation
Cordialement
François
Bien. Avec toutes ces informations, j’ai pu commander les différentes pièces nécessaires à ce projet, j’attends leur livraison avant de poster .
Bonjour! J’ai (enfin) reçu le servo driver d’adafruit ET le convertisseur DC DC, alors j’ai fait un petit schéma pour voir si j’ai bien compris le schmilblick ; je vous laisse juger.
http://hpics.li/e790acb
bonjour,
je trouve ce projet très intéressante et j’aimerai bien réalisé ce projet de fin d’ années qui m’ a été demander par mon prof j’aimerai avoir de l’aide concernant les procédures de votre projet dans les détails.
merci de votre compréhension
Bonjour
comme indiqué dans l’article c’est un projet de Benoit qui a été décrit sur son blog.
reportez vous à cet article d’origine 🙂
Après si c’est un projet de fin d’année, vous pouvez vous inspirer du montage mais à mon avis c’est à vous de poser le cahier des charges et d’écrire les procédures 😉
bon, je dis ça parce que j’ai un passé de formateur!!
cordialement
François
bonjours francois
je m’ appelle Julien je suis premiere STI2D avec deux de mes camarade nous menons un projet similère au votre nous rencantron des pobleme serait il posssible de prendre avec vous par mail.
merci d’avance voici mon mail colizurte@gmail.com
Bonjour Julien
Ce n’est pas moi qui ai écrit cet article
essayez de contacter l’auteur
et revenez vers moi si besoin
si je peux vous aider ce sera avec plaisir
cordialement
François
Pouvais vous me communiquer le mail de Benoit.
Merci
Julirn
non, désolé… essayez de le contacter via les commentaires de l’article mais il ne semble pas répondre… et je ne trouve pas d’adresse de contact sur le blog
J’essayerai merci de votre disponibilité
Bonjour je cherche pour mon projet de terminale un moyen de controller la voiture avec son téléphone mais l’appli a été supprimé, en auriez vous une a conseiller