

Je souhaitais vous partager, ici, en quelques mots, un de mes “grands” projets de robotique en cours de réalisation et bientôt d’actualité. Mais quand je dis “grand”, c’est surtout dans le sens où ce projet comporte de nombreux aspects techniques et qu’il devrait s’étaler sur une période d’environ un an (et peut être plus … ). C’est un article de Frédéric qui vous avait déjà présenté un projet de boîtier pour le Raspberry Pi sous Fusion 360.
Au sommaire :
Un Raspberry PI sur la planète MARS ?
A la conquête de l’espace !
Le Raspberry PI a déjà fait partie de nombreux projets spatiaux très sérieux !

En effet, rappelez-vous, le 6 décembre 2015, 2 nano-ordinateurs surnommés Ed et Izzy ont été lancés en direction de l’ISS, la Station Spatiale Internationale.
Peu de temps après, en direct de l’espace, Thomas Pesquet présentait et soutenait le projet astro-pi (https://astro-pi.org/) qui donnait l’opportunité à de nombreux établissements scolaires, de développer et proposer leurs expériences.
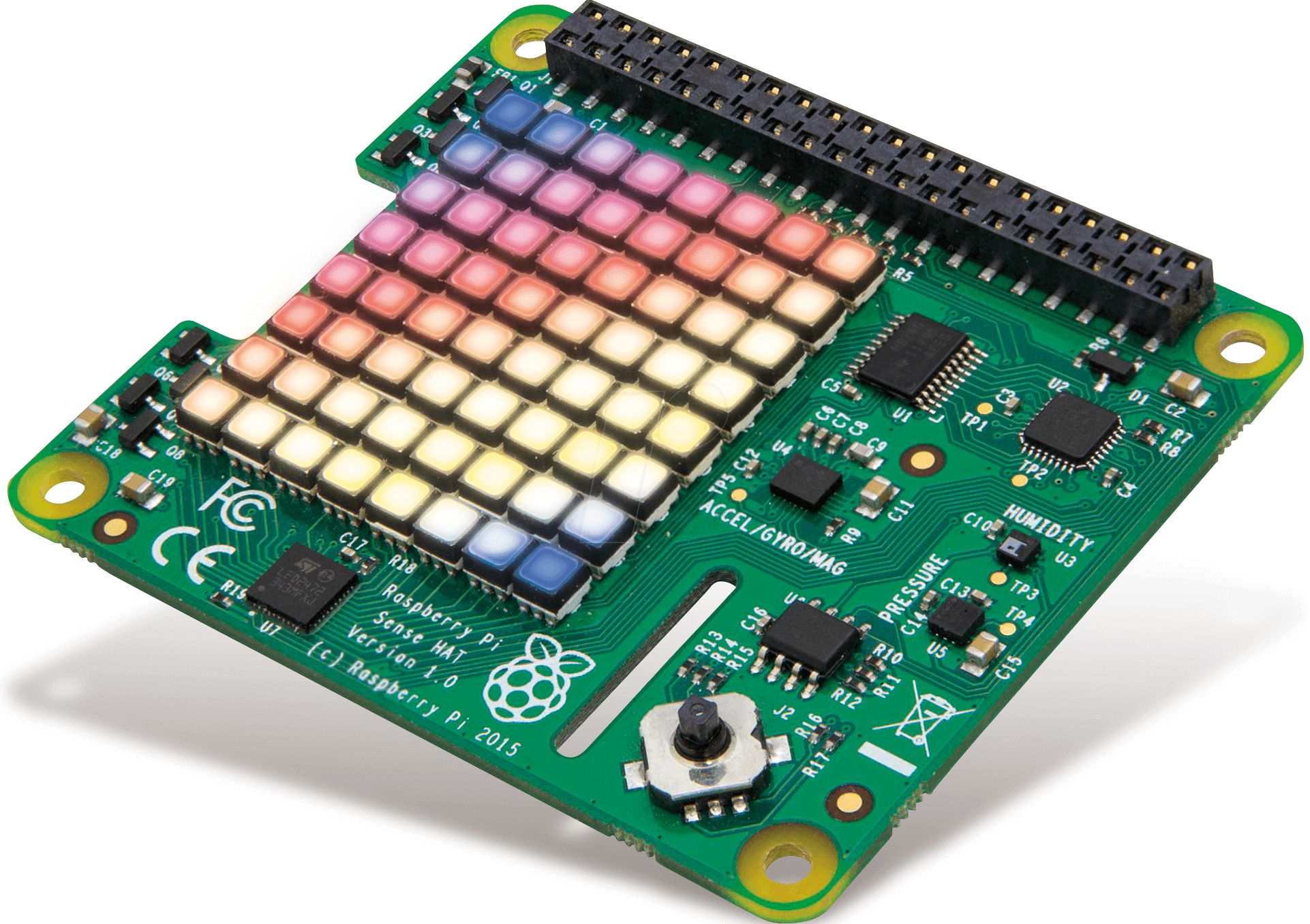 Dans le cadre de ce projet, la carte Sense Hat fut développée et partagée à la communauté. Elle est équipée de nombreux capteurs et une matrice de Leds, ce qui la rend vraiment très intéressante pour de nombreux autres projets :
Dans le cadre de ce projet, la carte Sense Hat fut développée et partagée à la communauté. Elle est équipée de nombreux capteurs et une matrice de Leds, ce qui la rend vraiment très intéressante pour de nombreux autres projets :
https://www.framboise314.fr/sense-hat-un-tour-dans-les-etoiles/
https://www.framboise314.fr/astropi-emulateur-de-sensehat-et-de-matrice-de-leds/
En 2014, on peut noter un autre projet qui embarquait un Raspberry PI, et qui consistait à aider Superman à rejoindre la stratosphère à bord d’une capsule spatiale :
https://www.framboise314.fr/un-raspberry-pi-emmene-superman-dans-lespace/
Plus récemment, en 2019, un PI Zero prenait son envole à bord d’un satellite lancé par une fusée Soyouz :
https://www.framboise314.fr/le-raspberry-pi-de-la-buanderie-a-lespace/
Il y a sans doute eu d’autres aventures ou tentatives d’aventures spatiales impliquant des Raspberry PI. Mais cette conquête de l’espace par nos cher nano-ordinateurs à processeur ARM ne s’arrête pas là !
La mission Mars Rover 2020
“Mars 2020” est une mission d’exploration de la planète Mars par la NASA , qui embarque un robot de type “Rover” développé par le centre de recherche JPL (Jet Propulsion Laboratory).
Cette mission a comme principal objectif la recherche de toute trace de vie. Elle se place dans la continuité des nombreuses autres missions impliquant des sondes et robots roulants.
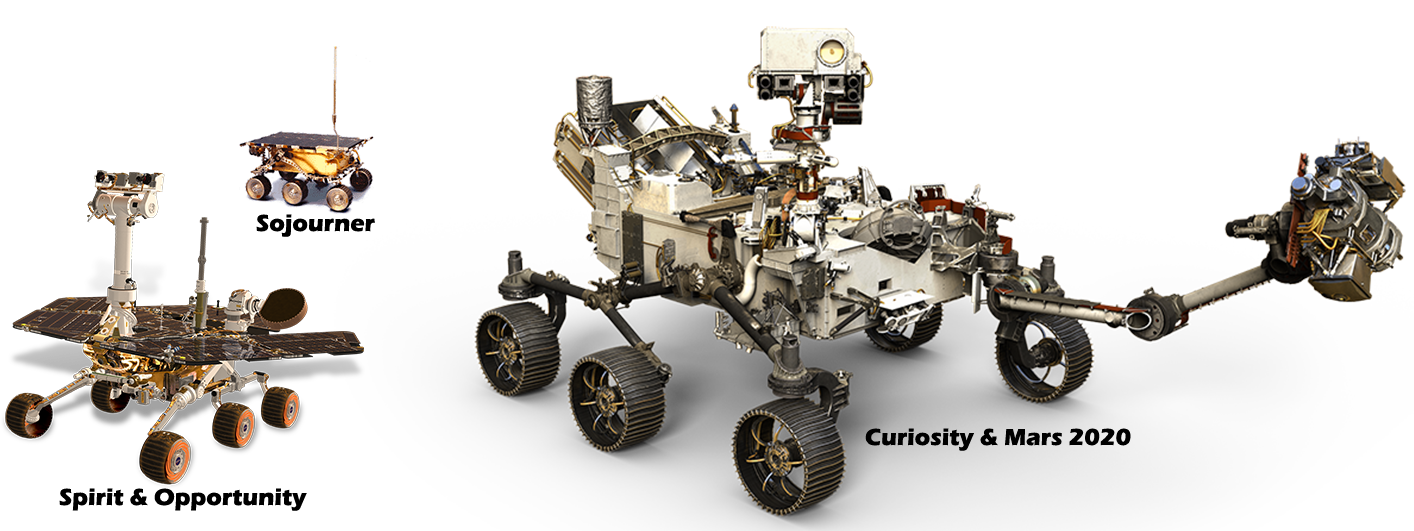
On peut énumérer, par exemple, les principaux Rovers déjà expédiés sur Mars par les missions de la NASA et qui sont de plus en plus gros :
- 1996 – Mars Pathfinder / Sojourner (10,6 kg)
- 2003 – Spirit et Opportunity (MER : Mars Exploration Rover – 185 kg )
- 2011 – Curiosity (MLS : Mars Science Laboratory – 900 kg)
- et bientôt, Mars Rover 2020, récemment baptisé “Perseverance” (plus d’une tonne !)
 Le décollage de cette nouvelle sonde spatiale, embarquant le Rover Perseverance, est prévu entre le 17 juillet et le 5 août 2020 depuis la base de lancement de Cap Canaveral, en Floride; pour un atterrissage sur la planète rouge en février 2021.
Le décollage de cette nouvelle sonde spatiale, embarquant le Rover Perseverance, est prévu entre le 17 juillet et le 5 août 2020 depuis la base de lancement de Cap Canaveral, en Floride; pour un atterrissage sur la planète rouge en février 2021.
Visiblement, la fenêtre de lancement est toujours maintenue par les équipes de la NASA. De nombreuses informations sont fréquemment publiées sur le site officiel.
Je vous invite à aller découvrir les nombreux médias, articles, photos, vidéos, ici :
https://mars.nasa.gov/mars2020/
Un Rover Martien en Open Source ? !
Lors des étapes de réflexion et de conception de mon projet (que je décris un peu plus bas), je cherchais des sources d’information sur les aspects gestion électronique et informatique d’un Robot à 6 roues, dont 4 sont directrices, équipé d’une tête robotisée et de nombreux capteurs. Et là ! je tombe sur un projet proposé librement par la NASA qui encourage la réalisation d’un Rover Martien conçu autour d’un Raspberry PI !
 En effet, le centre de recherche JPL (Jet Propulsion Laboratory) de la NASA propose une version open source du Rover, reprenant le même concept de véhicule à 6 roues utilisé pour explorer la surface de Mars.
En effet, le centre de recherche JPL (Jet Propulsion Laboratory) de la NASA propose une version open source du Rover, reprenant le même concept de véhicule à 6 roues utilisé pour explorer la surface de Mars.
Ce projet se veut une expérience d’enseignement et d’apprentissage pour ceux qui souhaitent s’impliquer dans le génie mécanique, les logiciels, l’électronique et la robotique.
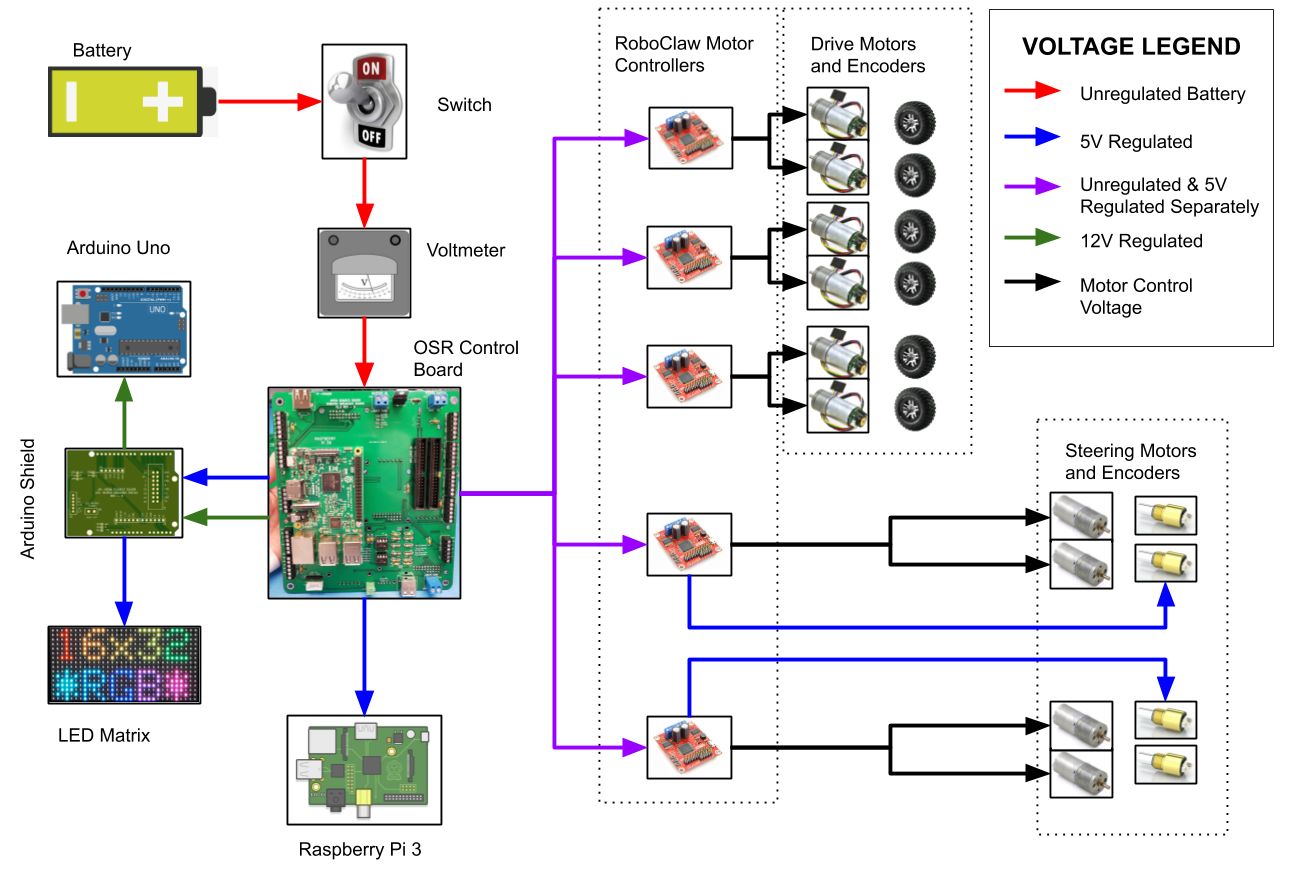
Un Raspberry PI 3, équipé du système d’exploitation ROS, Robot Operating System, (https://www.ros.org) se trouve au cœur de la gestion des 10 moteurs, de l’affichage et de l’énergie.
 Le JPL propose un descriptif et une documentation technique vraiment très détaillée de leur projet : https://github.com/nasa-jpl/open-source-rover
Le JPL propose un descriptif et une documentation technique vraiment très détaillée de leur projet : https://github.com/nasa-jpl/open-source-rover
Mon Projet robotique
Mon projet est inspiré par ces robots automatisés et conçus pour l’exploration d’autres planètes.
Motivé par la possibilité de concevoir et réaliser facilement mes propres pièces mécaniques à l’aide de l’impression 3D et de contrôler capteurs, moteurs, afficheurs à l’aide de mon Raspberry PI, j’ai entrepris la reproduction du robot “Perseverance” de mission “Mars 2020”.
Certes, à une certaine échelle : 77cm de long, contre 3 mètres pour l’original (échelle 1/4 environ).
La French touch
Mais contrairement au projet proposé par JPL en open source, qui se contente de l’aspect fonctionnel, l’idée principale de ma démarche est d’être le plus fidèle possible au modèle original !
En effet, ma première contrainte est de respecter les proportions et formes des différents éléments qui constituent le robot.
Seules quelques adaptations, liées à l’intégration des moteurs, par exemple, sont réalisées.
A l’aide des possibilités et à la puissance qu’offre le Raspberry PI, accompagné par quelques micros contrôleurs secondaires … , il sera aisé d’équiper mon projet de moteurs et de caméras. Ainsi le robot aura la capacité de se déplacer et d’observer son environnement.
Mais faute de moyens, le voyage vers la planète rouge n’est pas prévu dans mon projet.
Les grandes étapes
Comme beaucoup de projets de robotique, ce projet un peu fou (ok!), comporte de nombreuses étapes : observation, analyse, conception 3D, adaptation, mise au point, programmation, documentation.
Mais ce sont précisément toutes ces facettes multidisciplinaires qui rendent le challenge vraiment intéressant !
Le projet s’articule autour de 3 principaux axes :
- La conception et réalisation mécanique
- La conception et réalisation électronique
- La programmation
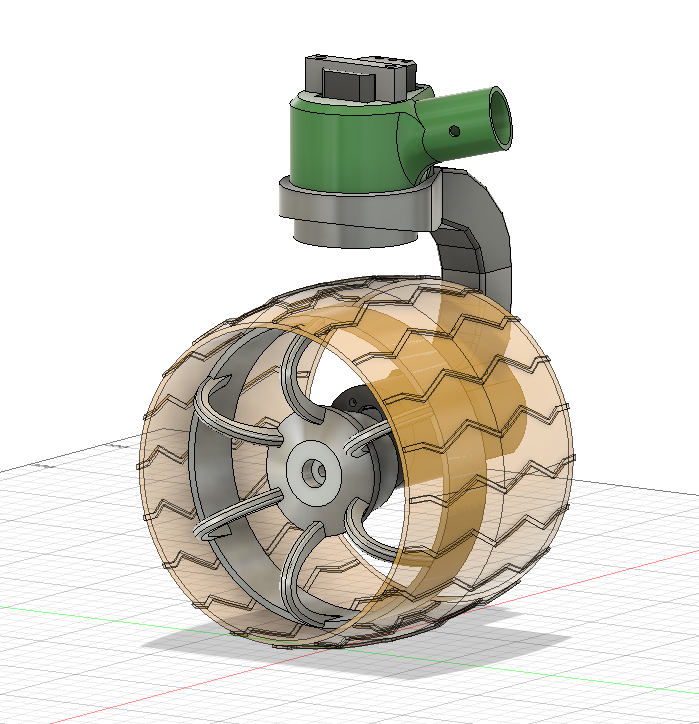 La majorité des pièces sont réalisées en impression 3D ou en découpage Laser, ce qui facilite leur production.
La majorité des pièces sont réalisées en impression 3D ou en découpage Laser, ce qui facilite leur production.
Il est donc nécessaire de redessiner et adapter chaque pièce lors de l’étape de modélisation 3D.
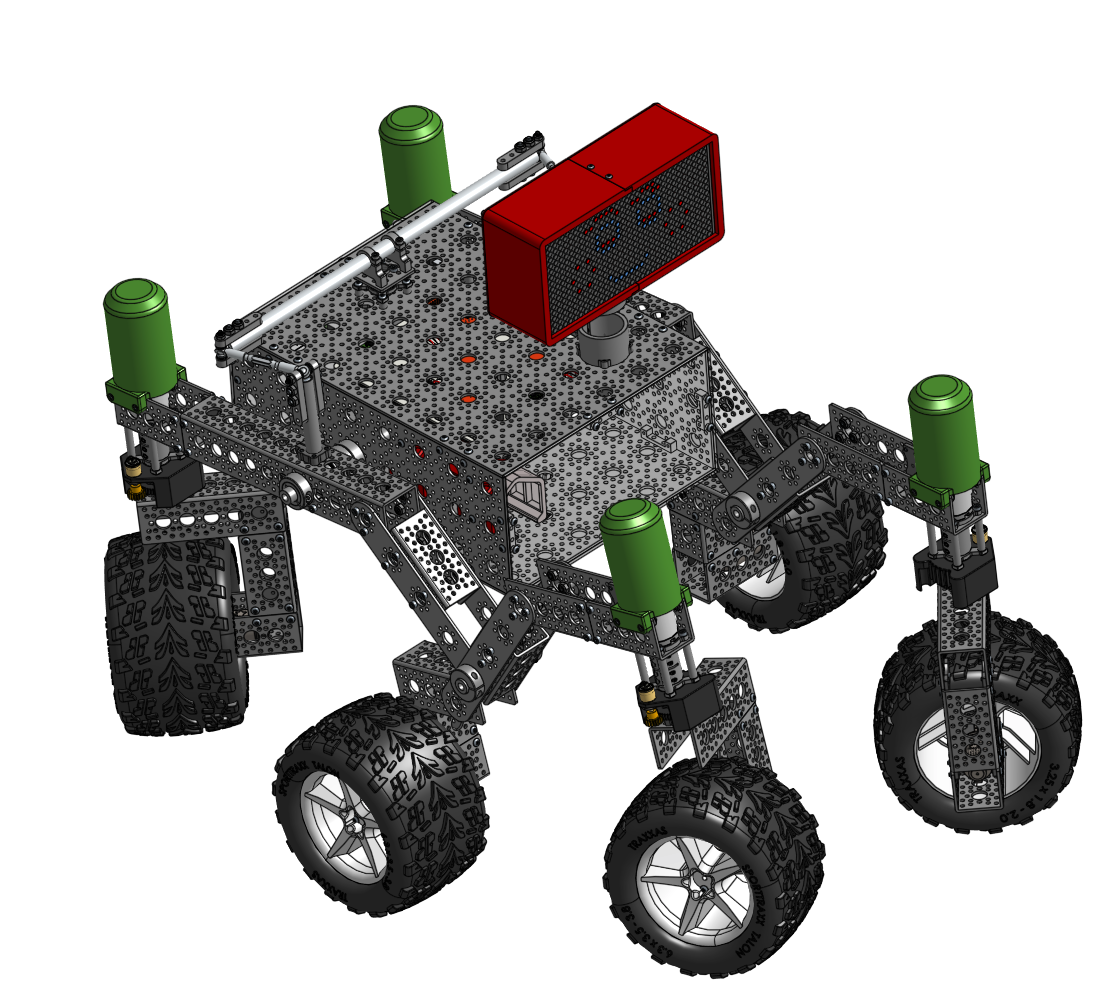
Après quelques mois d’analyse, de tests, et de conception, le projet rentre maintenant dans sa phase de réalisation.
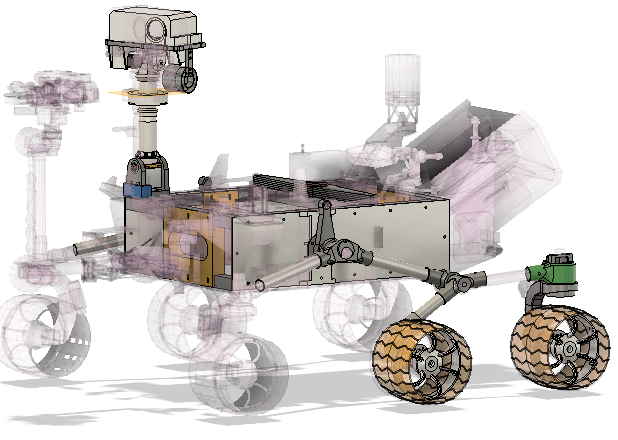 Le Rover commence à prendre forme !!!
Le Rover commence à prendre forme !!!
Les ressources techniques
Un autre aspect me semble très important dans tout type de projet. C’est le partage d’information et du retour d’expériences. Ce n’est pourtant pas du tout négligeable en terme de temps passé.
Je tente donc de documenter et d’illustrer progressivement mon travail à l’aide de schémas, photos, et vidéos que je partage librement.
 Mon projet est loin d’être terminé, il manque de nombreuses pièces mécaniques fonctionnelles ou décoratives, d’autres devront sûrement être refaites.
Mon projet est loin d’être terminé, il manque de nombreuses pièces mécaniques fonctionnelles ou décoratives, d’autres devront sûrement être refaites.
L’électronique est également encore en conception et en test, bien évidemment composé d’un Raspberry PI et quelques microcontrôleurs périphériques …..
N’hésitez pas à venir régulièrement prendre des nouvelles. Les photos et vidéos d’évolution sur un parcours d’obstacle ne devrait plus tarder !
c’est par ici (en musique et sans pub !) :
https://www.youtube.com/channel/UCUxHyG-bwT7SwvgKQXyW7PQ
https://www.youtube.com/playlist?list=PLPA2ZF9G4l–smeL5xHTISZBblAAfhV12
Conclusion
Merci à Frédéric d’avoir partagé avec les fans de Raspberry Pi ce projet un peu fou ! On espère juste pouvoir le voir « en vrai » lors d’une prochaine Maker Faire.
Wow !
Bon courage Frédéric !
Pour ma part, j’ai commencé à utiliser un peu R.O.S. pour faire du SLAM, mais c’est…ouch..un peu « velu »…
merci Stéphane,
effectivement, une peu chaud ROS, j’ai commencé à faire quelques …. une vraie découverte !
Bonjour. Pourquoi ne pas faire des essais dans un endroit sur terre semblable à Mars…
step by step 😉 … on va commencer à le faire rouler sur du plat ,
il faut que je cable tous les moteurs et au je termine l’electronique
Ping : Créer sa carte HAT pour Raspberry Pi avec EasyEDA - Framboise 314, le Raspberry Pi à la sauce française....
Ping : Créer et Entraîner son propre IA pour le module AI HAILO du Raspberry PI 5 [Partie 1] - Framboise 314, le Raspberry Pi à la sauce française....