


Photo prise depuis le bateau de Tim
En 1999, Timothé a fabriqué un bateau en bois long d’un mètre. Ce bateau embarque deux servomoteurs. L’un est rattaché à un variateur qui permet de faire tourner plus ou moins vite un moteur sur lequel est rattachée l’hélice. L’autre permet de changer l’angle du gouvernail. Ces deux servomoteurs peuvent être contrôlés par radio à l’aide d’une télécommande.
Tim a souhaité remplacer la télécommande par un téléphone ou une tablette. Il voulait également ajouter une caméra pour voir ce que le bateau voit et pouvoir prendre des photos.

Le bateau en cale sèche
Il a pensé au Raspberry Pi et s’est inspiré des publications d’Olivier, l’auteur du blog MagdiBlog qui a été une véritable source d’inspiration pour lui. Ce blog est exceptionnellement bien écrit et agréable à lire. Les projets sont intéressants, détaillés et précis. Plusieurs parties du projet de Tim n’auraient pas pu être réalisées sans les explications d’Olivier. Tim recommande vivement son site à tous ceux qui s’intéressent au Raspberry Pi et si vous ne le connaissez pas, je vous invite à aller le visiter.

La caméra est fixée sur le toit du bateau
La caméra a un aspect bizarre mais c’est uniquement dû au joint qui sert à étanchéifier ce composant. Jetons un coup d’œil dans les entrailles de la bête :
 1. Une batterie 6V 12A pour alimenter le moteur.
1. Une batterie 6V 12A pour alimenter le moteur.
2. Un moteur auquel est rattaché un arbre moteur qui entraîne l’hélice du bateau.
3. Un servomoteur qui pilote par son angle de rotation et à l’aide de la tige métallique un variateur.
4. Le variateur qui va définir la vitesse et le sens de rotation du moteur.
5. Un Raspberry Pi modèle B 512MB protégé par une coque dont une partie est découpée pour laisser l’accès aux broches GPIO. C’est lui le chef d’orchestre qui va :
- recevoir les commandes provenant du téléphone
- piloter le servomoteur qui contrôle le moteur
- piloter le servomoteur qui contrôle l’angle du gouvernail
- prendre des photos à l’aide la webcam, les stocker en local sur sa carte SD et envoyer une miniature au téléphone par mail.
- filmer à l’aide de la webcam et « streamer » le flux vidéo au téléphone
6. Assembled Pi Cobbler Breakout Kit qui sert à raccorder facilement le port GPIO du Raspberry Pi sur un breadboard sur lequel sont reliés les servomoteurs
7. Batterie pour portable : On ne la voit pas très bien mais il s’agit d’une batterie externe pour téléphone portable qui sert de chargeur de secours pour des téléphones ou tablettes Apple. Celle-ci convient parfaitement comme source d’alimentation du Raspberry Pi. Elle tient d’ailleurs pas mal de temps.
8. Une pile 4.5 V qui permet d’alimenter un petit projecteur à LED contrôlé par une broche du port GPIO.

Commande de gouvernail
Liaison avec le bateau
 Tim a choisi une liaison WIFI. Le téléphone portable utilisé en hotspot attribue une adresse au Raspberry Pi. Le Dongle WIFI a été sorti du bateau avec une rallonge pour améliorer la portée.
Tim a choisi une liaison WIFI. Le téléphone portable utilisé en hotspot attribue une adresse au Raspberry Pi. Le Dongle WIFI a été sorti du bateau avec une rallonge pour améliorer la portée.
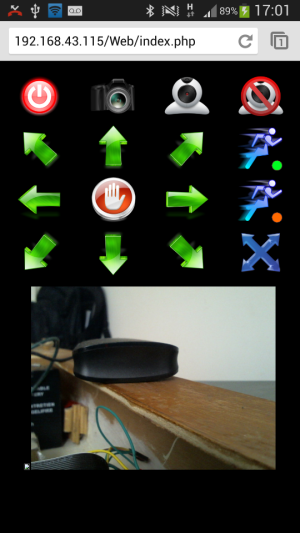
L’interface de commande
Enfin, Tim a développé une interface web pour commander tout cela depuis son téléphone portable.
 Le résultat
Le résultat
 Cette photo prise depuis le bateau de Tim montre la qualité des images obtenues avec cette belle réalisation.
Cette photo prise depuis le bateau de Tim montre la qualité des images obtenues avec cette belle réalisation.
Tim a eu des soucis d’hébergement de son blog, mais Magdiblog a gentiment proposé d‘héberger son article. Vous y retrouverez une description vraiment détaillée et également la totalité des programmes utilisés.
Un bel exemple de réalisation et j’espère que Tim a d’autres projets. Bravo ! et merci à Olivier d’avoir ouvert ses pages à Timothé.
Sources :
Superbe idée et magnifique réalisation ! Bravo
Merci ! 🙂
Ping : Tim nous mène en bateau avec le Raspberr...
Joli !
Si tu désires bricoler un peu plus, un pont en H pour le pilotage de ton moteur et bye bye le variateur d’un autre temps !
amicalement
C’est superbe, mais une question, que se passe-t’il si on perd la connexion wifi (sachant que ce genre de dongle ne permet pas plus d’une dizaine de mètre) 😀
bonjour Nicolas
à vue ça porte peut être un peu plus ?
sinon il y a des cles USB comme la TL WN722 qui ont une antenne et donc portée plus importante…
cordialement
François
Merci de votre réponse, je me demandais surtout si le concepteur avait pensé à faire faire à son bateau un demi-tour en cas de perte de signal… 😉
En ce qui me concerne, j’ai acheté cette antenne, je compte bien faire des essais de distance 😀
http://www.amazon.fr/CSL-Antennes-amplificateurs-omnidirectionnelle-Wireless/dp/B00OUO9EZY/ref=pd_sim_23_4?ie=UTF8&refRID=1CCJASZ273F3MJR2J1H5&dpID=31G9873K0VL&dpSrc=sims&preST=_AC_UL160_SR160%2C160_
Bonjour Nicolas,
J’y ai pensé effectivement mais je ne l’ai pas mis en oeuvre. Je me suis toujours arrangé pour qu’il n’aille pas trop loin au cas où. 🙂 Ou bien que le rayon de l’étang sur lequel j’étais ne soit pas beaucoup plus que 10 mètres. 🙂
En tous cas, je pense que ça ne devrait pas être trop compliqué à mettre en oeuvre. Il faut par exemple contrôler régulièrement (dans un cron) que le raspberry ping toujours le téléphone et si non alors faire agir les entrées-sorties en conséquence. J’imagine qu’il y a différents moyens de gérer ça.
Tu bosses sur un projet perso ?
Tim