

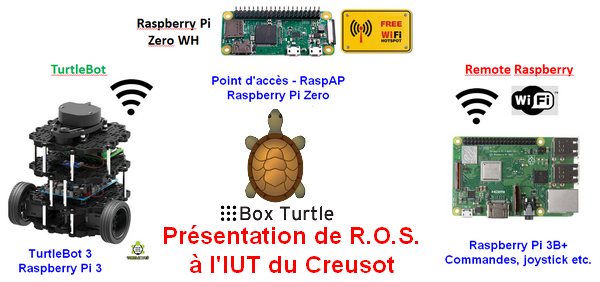
Présentation très intéressante cette semaine à l’IUT du Creusot. En préparation des TP pour les GEII 2ème année, une équipe a travaillé sur le robot TurtleBot 3 et a mis en œuvre R.O.S. (Robot Operating System) sur une infrastructure Raspberry Pi.
R.O.S. sur le Robot TurtleBot 3

Le robot TurtleBot 3 dont le « cerveau » est un Raspberry Pi 3. Devant lui, la manette qui permet de le piloter. Il est également possible de commander les déplacements depuis la tablette. Sur la droite de l’image, le Pi3B+ utilisé pour commander le robot.
Un Raspberry Pi Zero est utilisé en Point d’accès WiFi (Acces Point), ce qui évite l’utilisation du réseau de l’établissement.



Démonstration de pilotage du robot par Patrick, d’abord à la manette, puis avec la tablette.


Patrick montre les différents composants du système, le Raspberry Pi « central » et le point d’accès wifi.
La présentation de diapos permet aux participants de mieux comprendre la structure de R.O.S. depuis son installation, le fonctionnement des noeuds, des topics et linteractions au niveau du système.
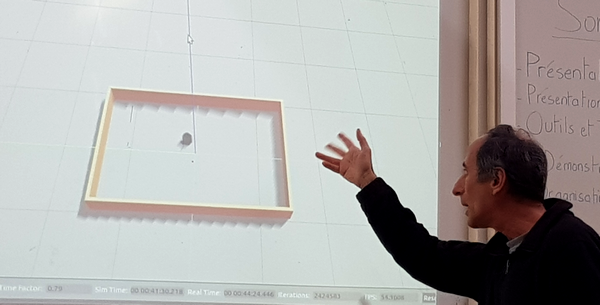
Après la partie « technique » de R.O.S., Denis nous a présenté les simulateurs Gazebo et RViz.
La simulation robotique est un outil essentiel dans la boîte à outils de tout roboticien. Un simulateur bien conçu permet de tester rapidement des algorithmes, de concevoir des robots, d’effectuer des tests en utilisant des scénarios réalistes. Gazebo offre la possibilité de simuler avec précision et efficacité des populations de robots dans des environnements intérieurs et extérieurs complexes. Ici le projet consistait en un lieu rectangulaire, entouré de murs entre lesquels lequel le robot évolue. Il est possible de reproduire un environnement réel en 3D et d’apprendre au robot à se déplacer dans cet environnement.
Le décor pourrait être une maison, un labyrinthe…
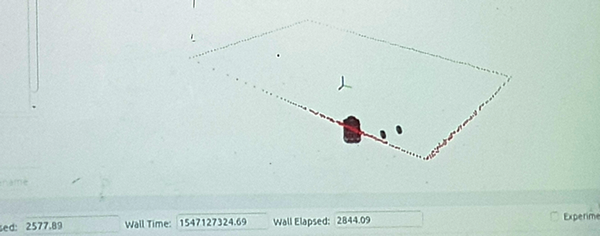
RViz permet quant à lui, de reconstituer l’environnement à partir des informations captées par le robot. Ici le robot évolue dans le rectangle et Rviz représente ce que le LIDAR du robot pourrait réellement mesurer. Dans la réalité, les informations peuvent également provenir de caméras et il devient possible de reconstituer très précisément l’environnement du robot. La (courte) vidéo ci-dessous vous présente cette possibilité :
Vidéo
Vidéo prise lors de la démonstration. Le robot TurtleBot 3 au sol, puis le LIDAR tournant qui lui permet de cartographier son environnement.
Conclusion
Après midi très enrichissant et découverte de l’environnement de R.O.S.
Les étudiants vont commencer dès le mois prochain à travailler sur des travaux pratiques mettant en application ces différents composants. Le point particulièrement intéressant pour les amateurs de framboise, c’est que le robot comme l’infrastructure destinée à le faire fonctionner sont basés sur des Raspberry Pi de différents modèles qui montrent ici leur efficacité pour la formation.
Sources
- https://fr.wikipedia.org/wiki/Robot_Operating_System#Architecture_de_communication
- https://www.turtlebot.com/
- http://www.ros.org/
- http://gazebosim.org/
- http://wiki.ros.org/rviz
Ce robot est génial mais il me semble un peu compliquer et surtout assez fragile mais à part je l’adore!
Merci!