


En début d’année 2023, Sunfounder m’avait fait parvenir une première version de PiDog, leur chien robot. Vous avez pu le voir en action sur différents salons : sur le Fest’Inc de Loos en Gohelle, Nantes Maker Campus 2023, la Maker Faire Eindhoven 2023 ou encore le salon Robotik d’Orchies en fin d’année. Il a également participé à plusieurs salons locaux sur le Creusot et Macon. Malgré de nombreuses heures d’activité, en particulier lorsqu’il est piloté par les enfants avec la tablette, il a toujours répondu présent.
Au sommaire :
PiDog le chien robot de Sunfounder
Montage

Le robot arrive dans une boîte en carton très solide. Aucun dégât constaté à la réception.

La première chose qu’on trouve dans la boîte est la notice de montage. Je vous conseille de vous référer de préférence à la notice en ligne qui est plus à jour et comporte les corrections remontées par les testeurs.

Les différentes pièces du chien PiDog sont réparties par catégories dans des boîtes différentes.

Les cartes électroniques sont dans des sachets antistatiques. Il faudra, de votre côté, les manipuler en essayant de ne pas les soumettre à des décharges d’électricité statique. Le mieux étant le tapis antistatique et le bracelet qui vous décharge des tensions générées par les frottements. Ne bricolez pas cela vous même, le bracelet comporte une résistance qui évite l’électrocution en cas de contact avec le secteur 😉 N’utilisez que du matériel certifié !

Ici ce sont les servomoteurs à engrenages métalliques. Petits mais avec des temps de réponse courts pour sonner de l’agilité au chien PiDog. La batterie est montée prête à l’emploi. Ce sont deux batteries 18650. J’en ai préparé d’avance avec les mêmes prises, ce qui permet d’avoir des batteries d’avance, même si le remplacement n’est pas simple, vu comme elles sont placées.
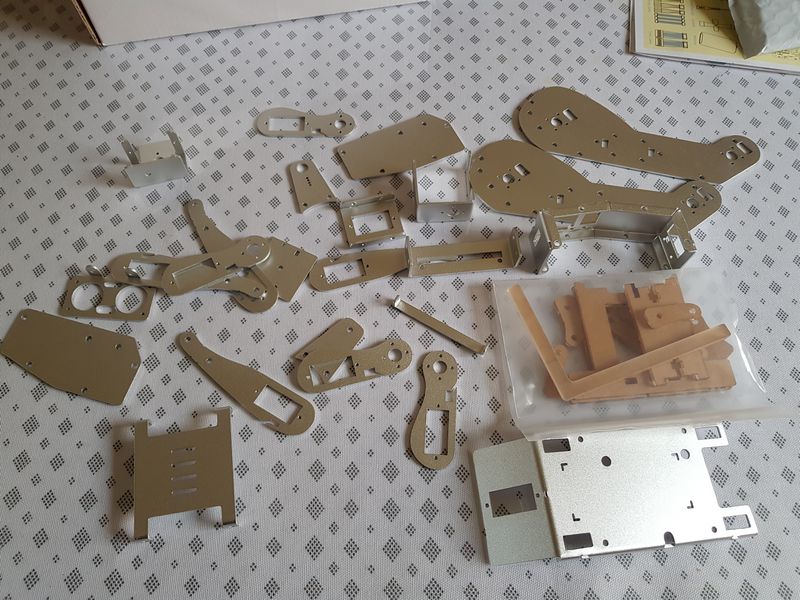
Le corps du robot chien est en aluminium. L’épaisseur des plaques assure une rigidité maximale à l’ensemble.

Vue sur la notice en papier fournie dans la boîte.

Les outils sont fournis. Ici on a la visserie et les rivets. Il faudra âtre attentif et bien respecter les consignes lors du montage. Pour info j’ai mis environ 3 demi journées rien que pour le montage complet. A noter que les sachets contiennent plus de pièces que nécessaire, en général. Vue la taille de certaines vis ou écrous, c’est à noter (vous n’en faites jamais tomber, vous ?).
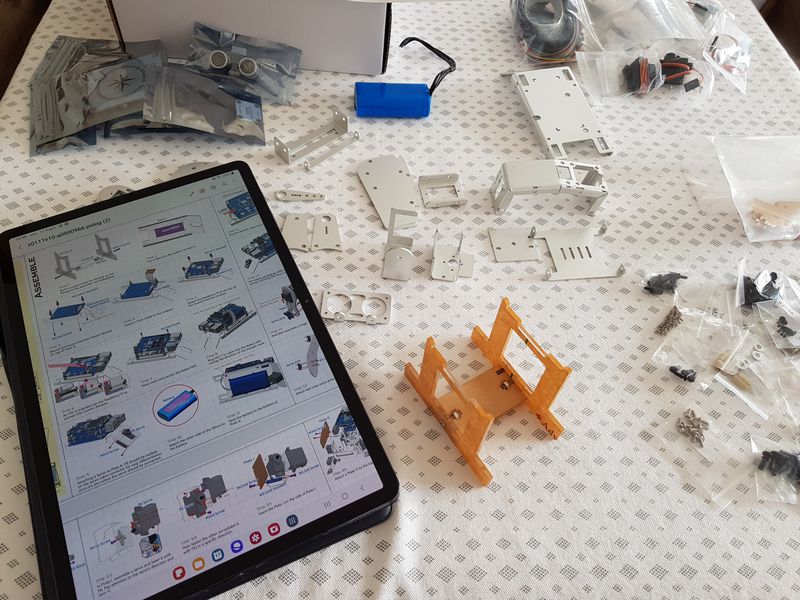
La tablette affiche la notice en ligne. A droite de la tablette le support sur lequel le robot repose pour certaines phases du montage.
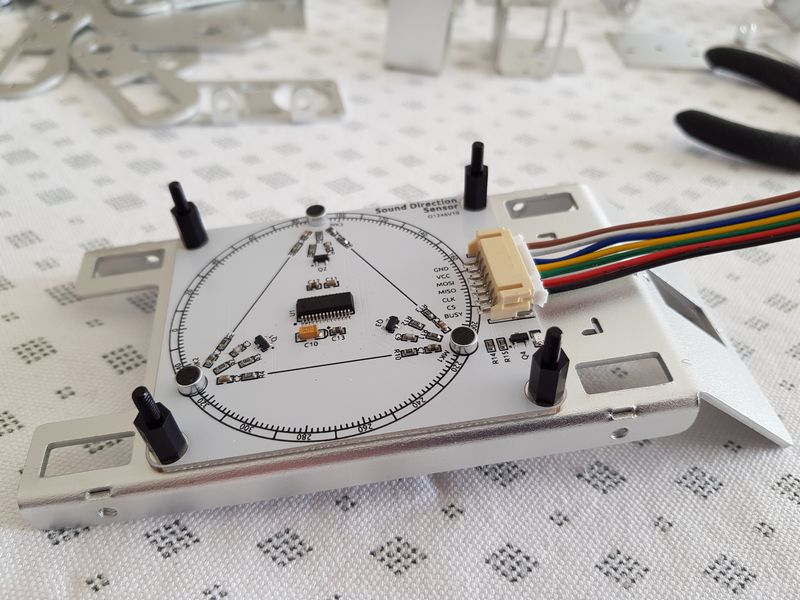
On commence par monter la plaque détectrice de son sur le châssis. Les 3 micros permettent de mesurer le moment auquel un son arrive. Comme il n’arrive pas au même moment sur les 3 micros, un « simple » calcul permet de déterminer la provenance du son. Exemple : vous tapez des mains et le chien tourne la tête dans cette direction.
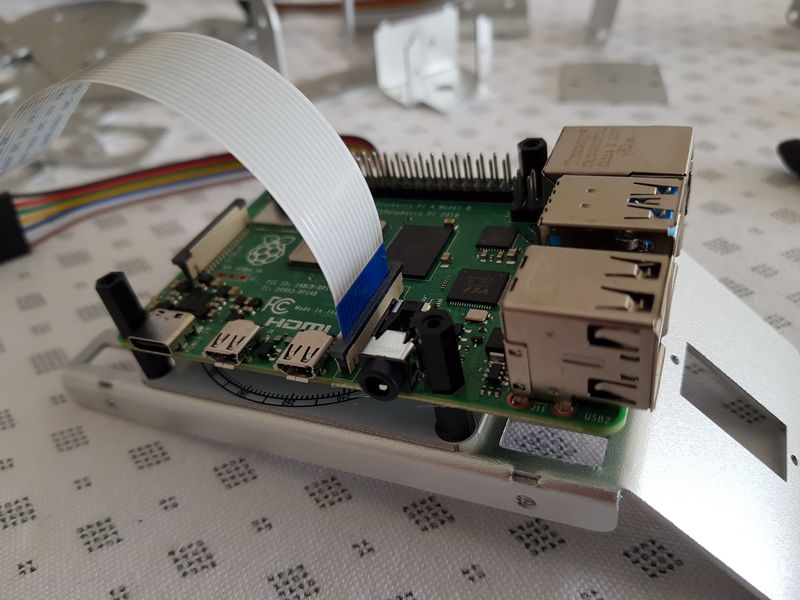
On pose ensuite sur cette carte le Raspberry Pi qui sera le cerveau de notre chien. J’ai opté pour un Raspberry Pi 4 pour des questions de puissance de calcul. Comme on était encore dans les pénuries de composants suite au COVID, cet achat a un peu « piqué », mais bon, de toute façon je n’avais plus de RasPi en stock 😥
Vient enfin au dessus du Raspberry Pi la carte RobotHAT qui se connecte sur la prise GPIO du RasPi. La carte est décrite en détail (mais en anglais) sur cette page.
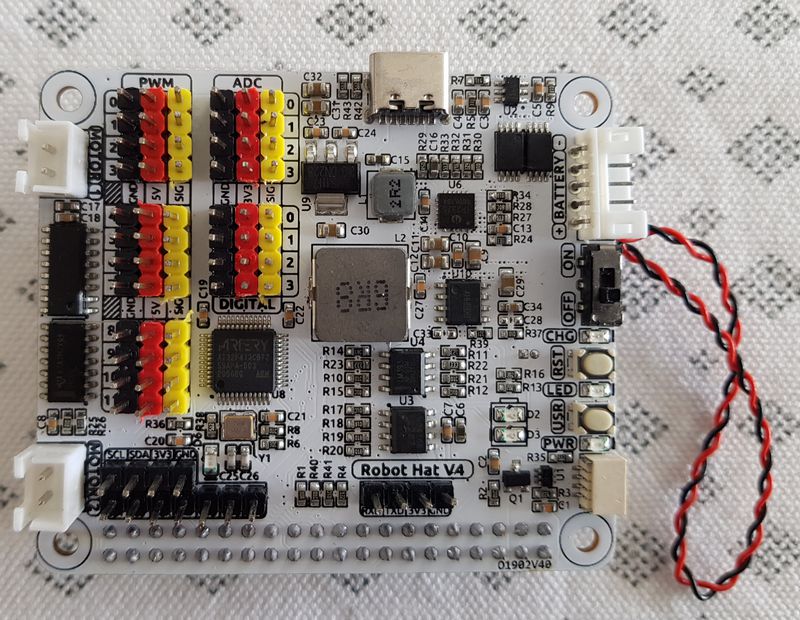
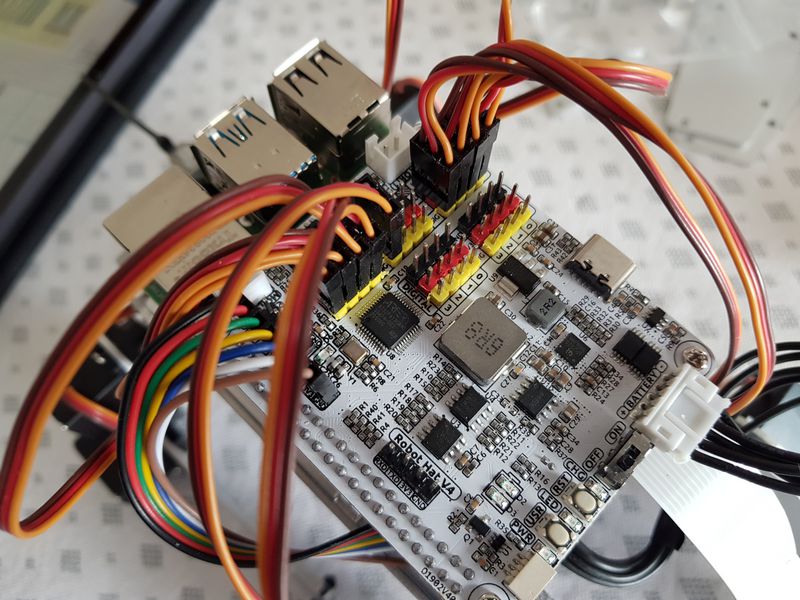
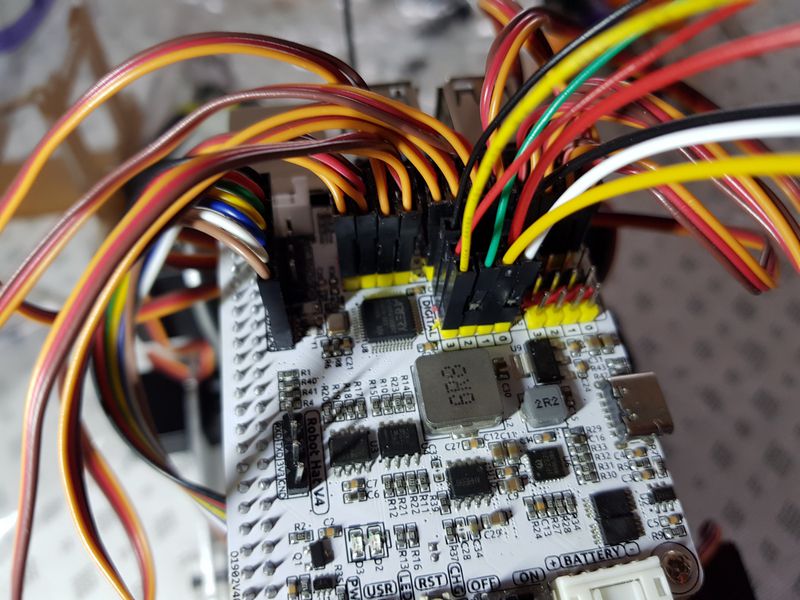
La carte Robot HAT v4 est une carte d’extension multifonctions qui permet de transformer rapidement un Raspberry Pi en robot. Un microcontrôleur (MCU) est monté sur la carte, il permet d’étendre les possibilités du Raspberry Pi en PWM et en entrée ADC. La carte comporte une puce de pilotage de moteur, un module Bluetooth, un module audio I2S et un haut-parleur mono. On accède aussi aux GPIO qui sortent du Raspberry Pi lui-même.
Le microcontrôleur est un modèle AT32F415CBT7 d’Artery. Il s’agit d’un processeur ARM Cortex-M4 avec une fréquence d’horloge maximale de 150 MHz. Le microcontrôleur dispose de 256 Ko de mémoire Flash et de 32 Ko de mémoire SRAM.
La carte RobotHAT v4 accepte une entrée d’alimentation de 7 à 12V sur des prises PH2.0 à 2 broches. Elle comporte 2 indicateurs d’alimentation. La carte dispose également d’une LED disponible pour l’utilisateur et d’un bouton pour vous permettre de tester rapidement certains effets.
Dans le document en ligne, vous aurez les informations complètes sur les fonctions d’interface de la carte RobotHAT et sur l’utilisation de ses interfaces à travers la bibliothèque Python robot-hat fournie par SunFounder.
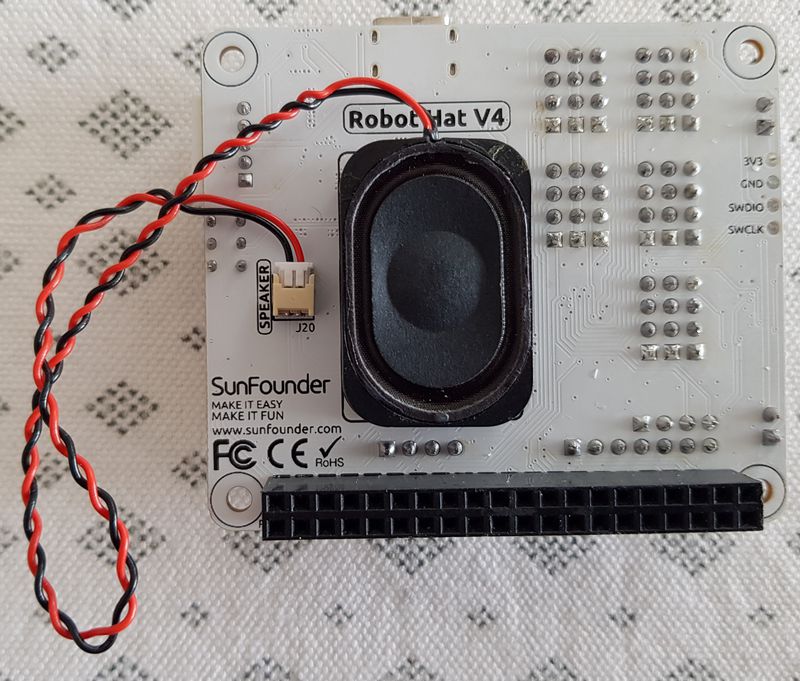
Un haut parleur plat situé sous la carte RobotHAT permet de diffuser des sons sur la chien.
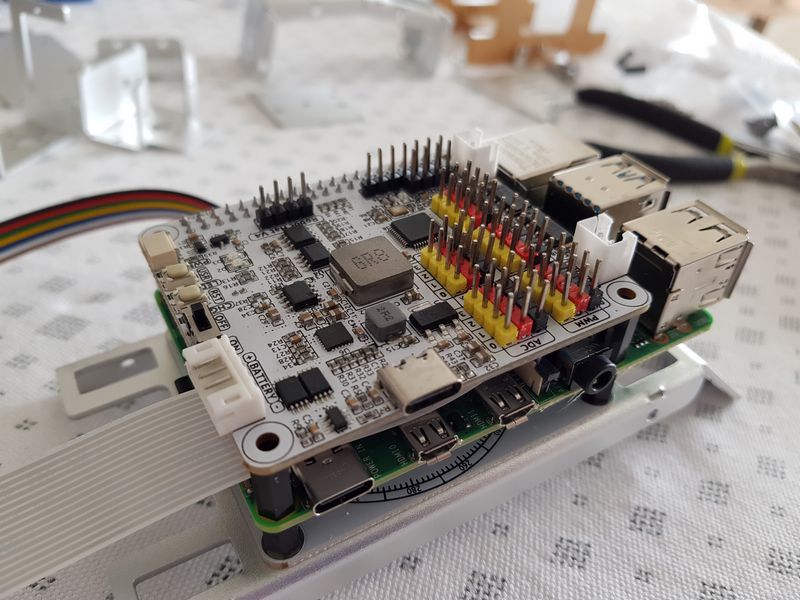
La carte RobotHAT montée sur le Raspberry Pi
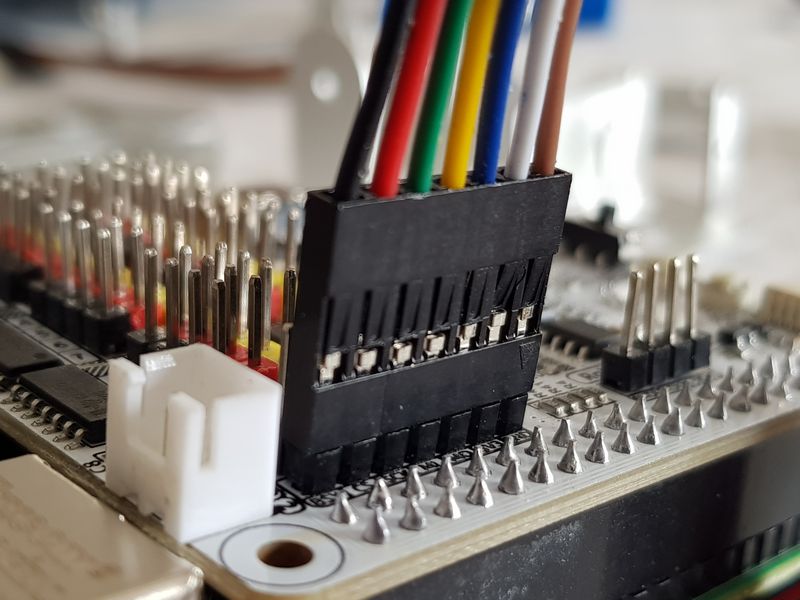
Il faudra bien entendu veiller à ce que les connecteurs ne soient pas montés à l’envers car il n’y a pas de détrompeur sur ce genre de connecteurs. Vérifiez plutôt 2 fois qu’une (et même trois fois !) avant de mettre sous tension.
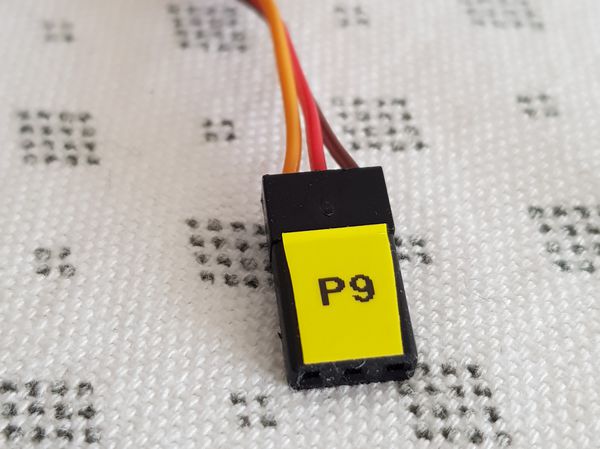
J’ai soigneusement étiqueté les différents connecteurs des servomoteurs pour écarter tout risque d’inversion.

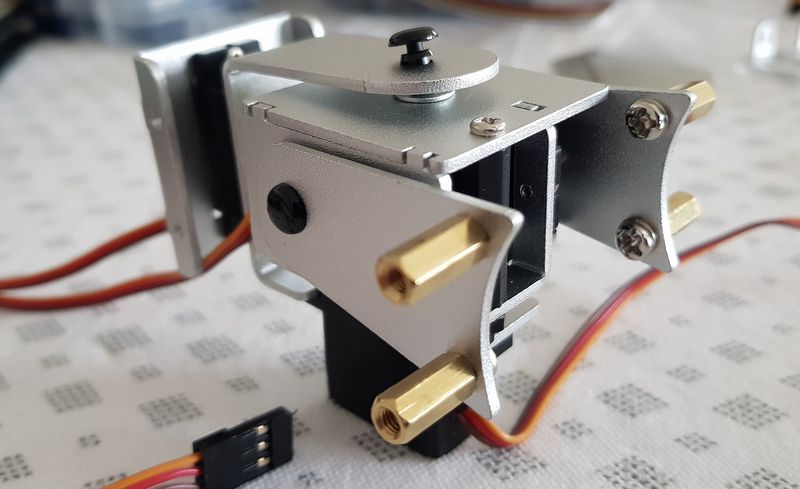
Montage des servos sur les pattes. Il faut positionner les servos sur un angle donné avant de les monter. Une procédure est décrite dans la notice.

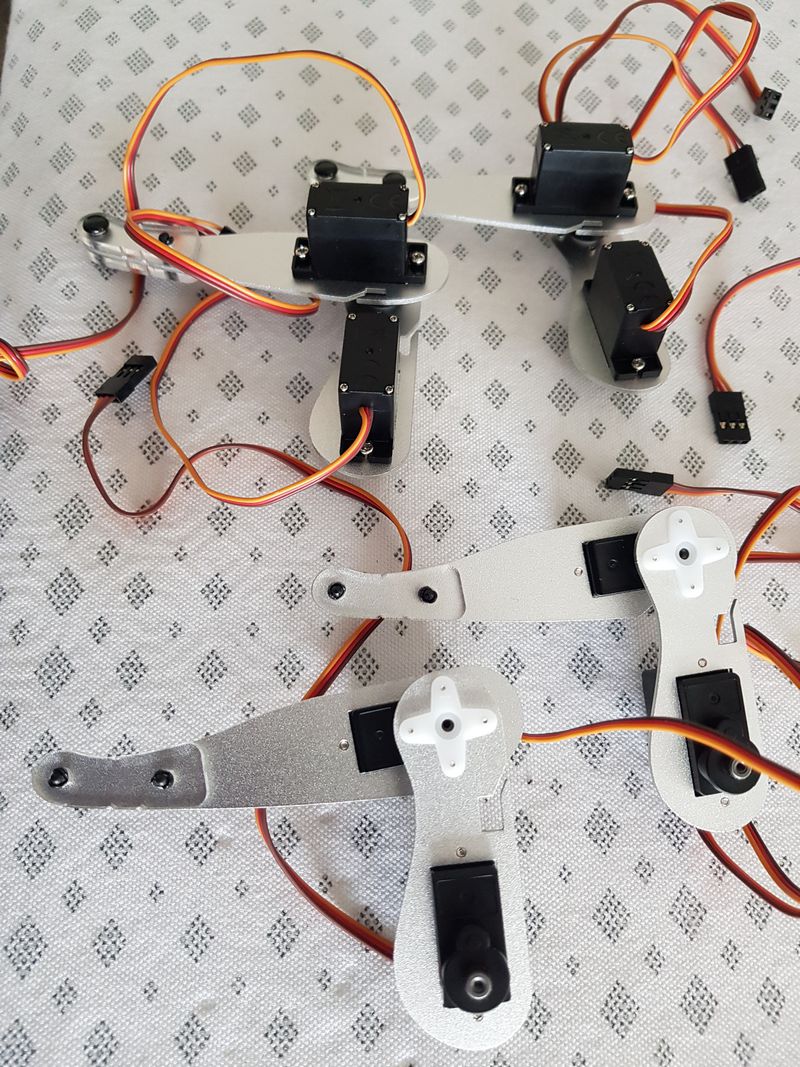
Les pattes sont prêtes à être montées sur le châssis.
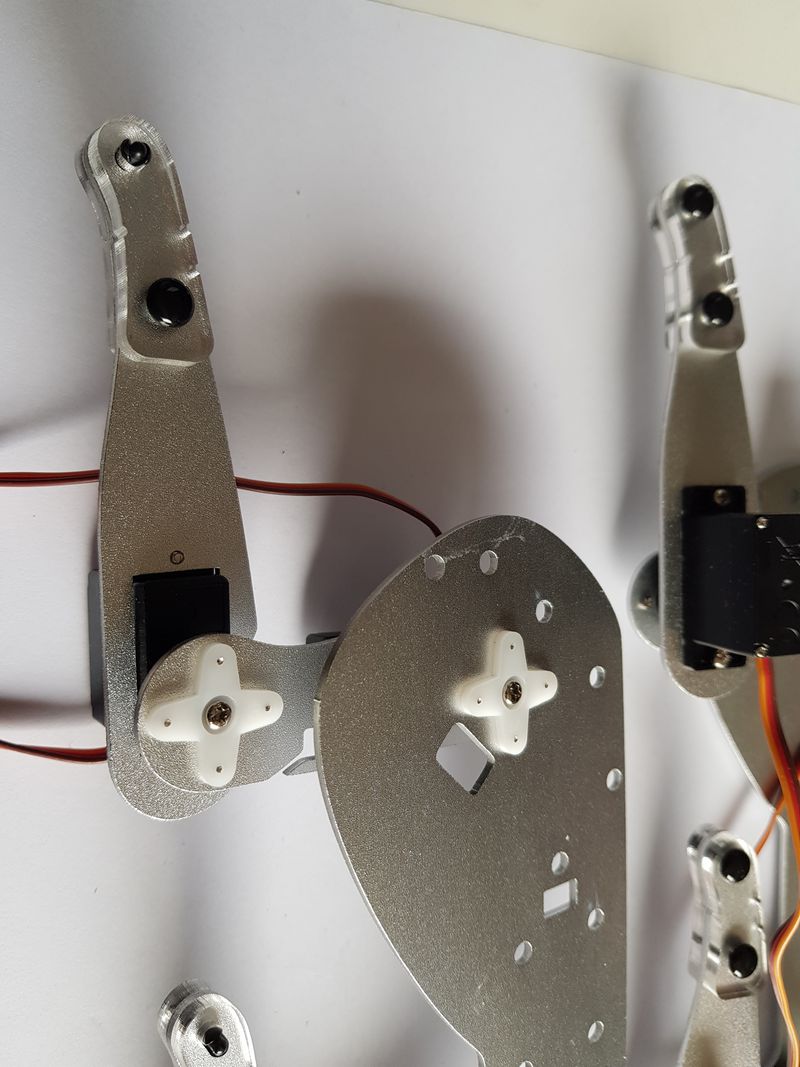
Montage des pattes sur le châssis.
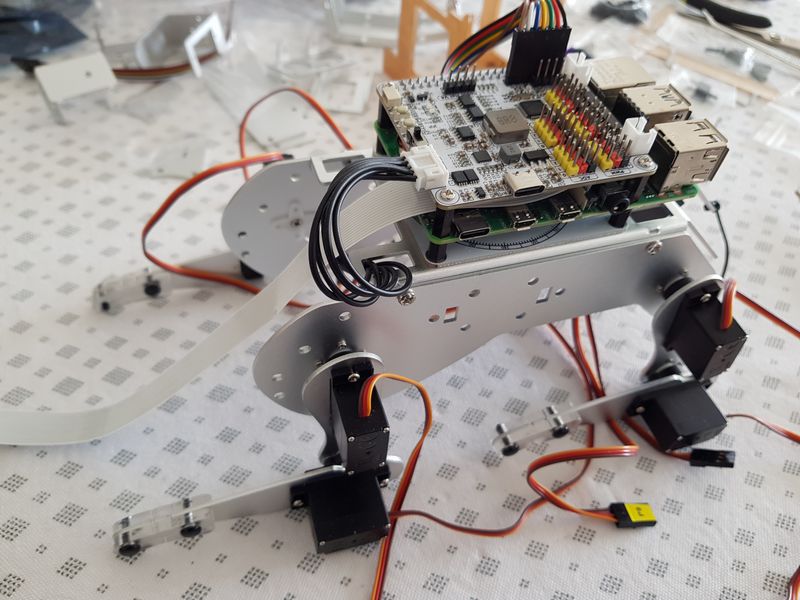
Ça commence à ressembler à quelque chose… La batterie 2000mAh est montées dans le corps du chien. On voit les 4 gros fils noirs sur la gauche qui amènent l’énergie sur la carte RobotHAT. La carte comporte également un chargeur et le point central des 2 batteries 18650 revient sur le chargeur pour permettre une charge équilibrée des deux batteries. Plus d’infos sur la batterie sur cette page.
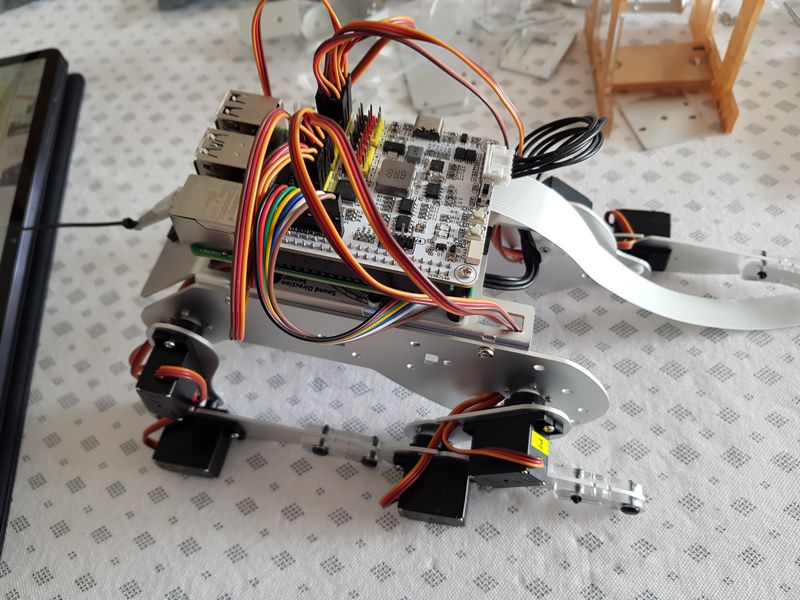
Il reste à relier les câbles des servomoteurs aux sorties PWM de la carte RobotHAT. Là encore, attention au sens de branchement !

Le capteur IMU 6DOF se place sur le flanc du chien. Il lui permet de connaître sa position dans l’espace et de garder son équilibre. Par exemple si on exploite les données du capteur, on peu poser le chien sur une plaque, bouger la plaque dans tous les sens et le chien reste en équilibre, en compensant avec ses pattes.

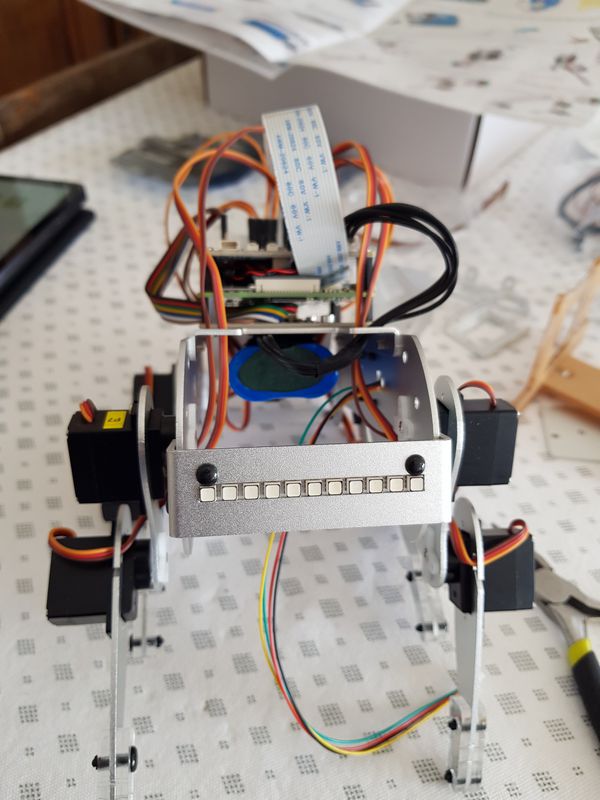
Cette partie est une barre de LEDs qui va pouvoir donner des indications ou simuler une respiration.
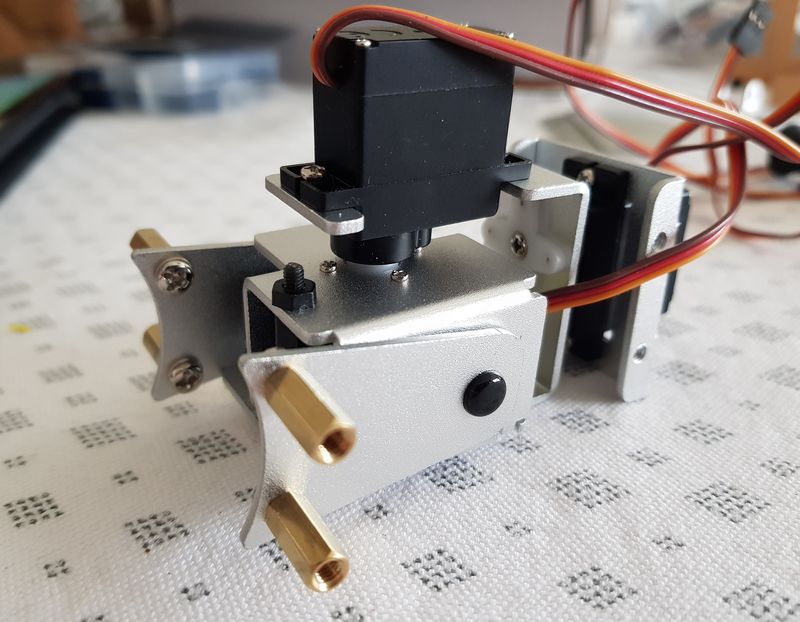
Montage de la tête du chien. Plusieurs servomoteurs lui donnent de nombreuses possibilités de déplacement.

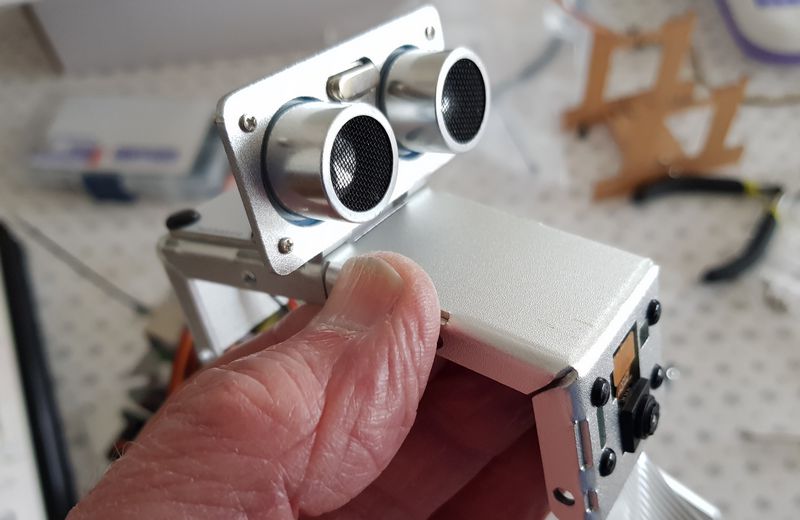
Montage du capteur de distance, qui figure les yeux du chien. La caméra vient dans le « nez » du chien et envoie les images sur la tablette quand on pilote le robot. Derrière le capteur ultrason, on distingue un PAD sensible qui détecte les « caresses » sur la tête du chien. On peut programmer une action en cas de détection de caresse (pencher la tête, remuer la queue, aboyer…)
Le tout se connecte bien sur sur la carte RobotHAT !
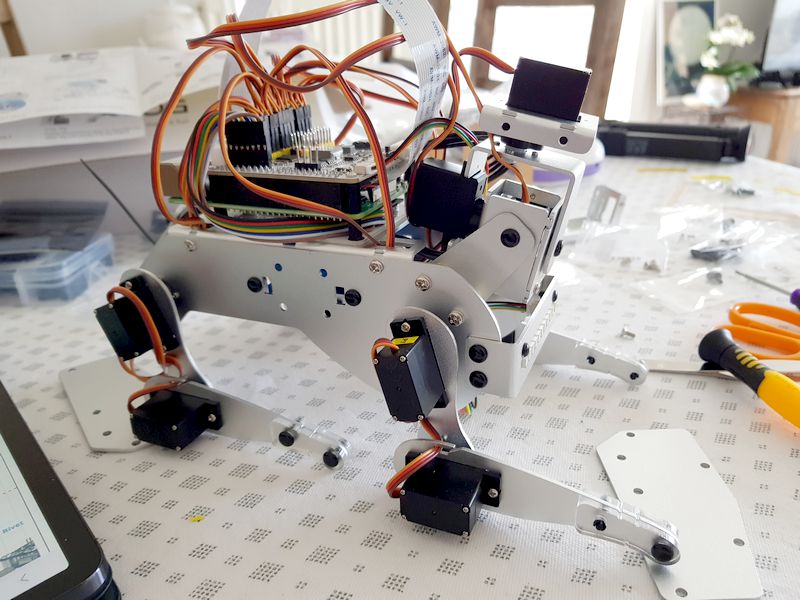
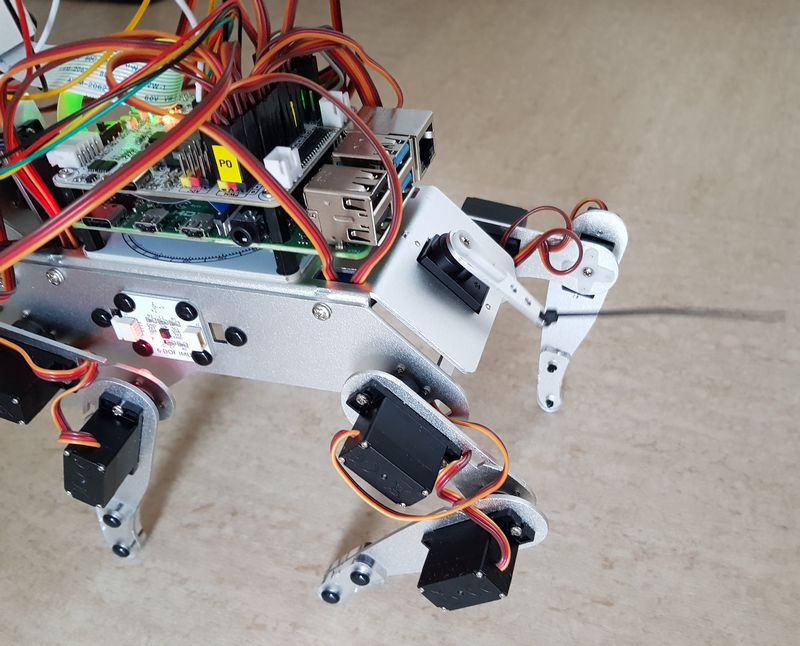
On arrive au bout du montage. Le chien commence à ressembler… à un chien, il faudra encore « peigner » les câbles, il y a des colliers nylon et de la gaine prévue à cet effet. J’ai préféré finir les tests complètement avant de gainer le câblage. c’est plus facile de revenir en arrière si les câbles ne sont pas déjà dans une gaine.
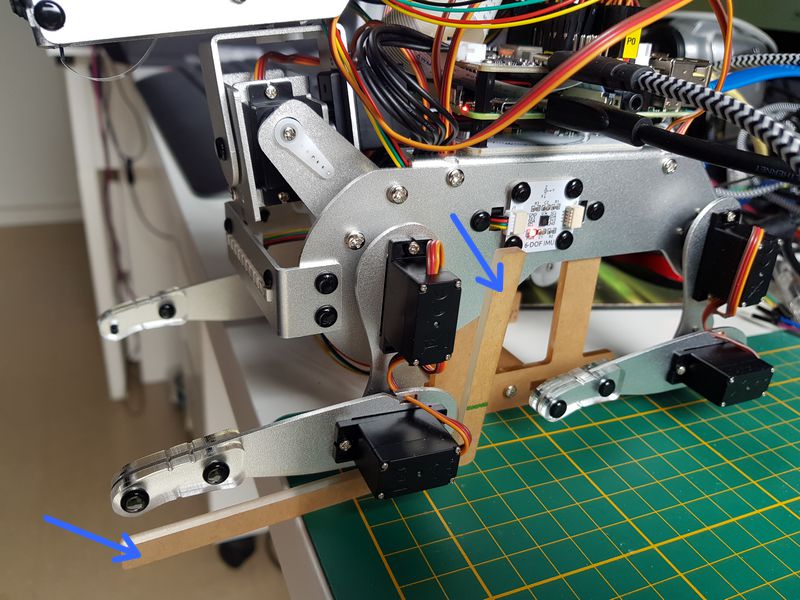
Les flèches bleues indiquent l’équerre fournie avec le chien pour régler les pattes.
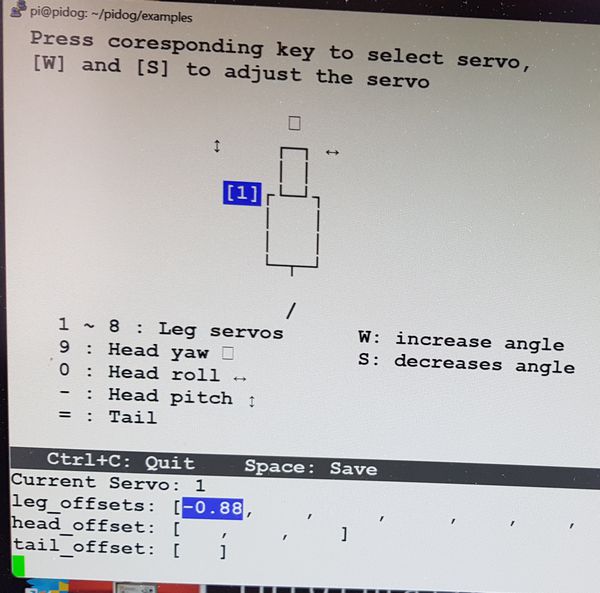
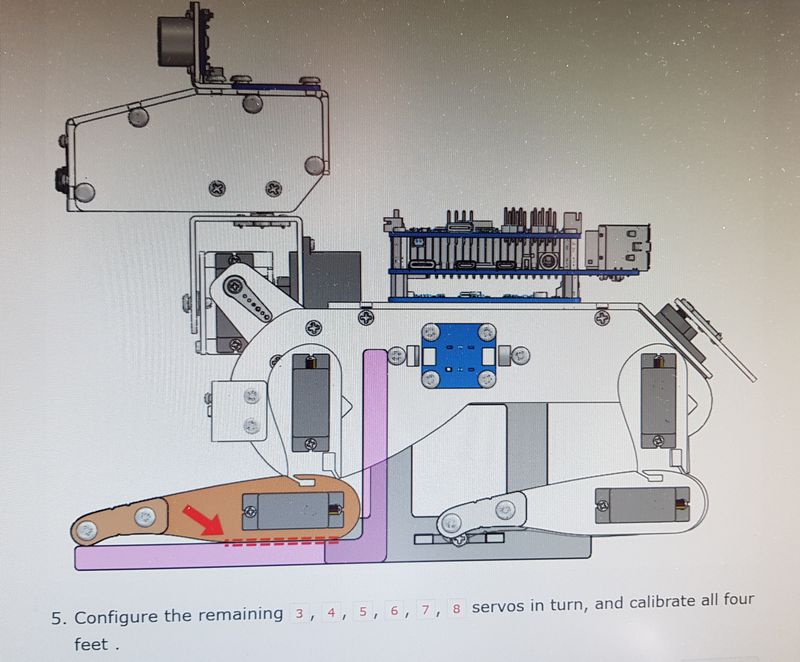
Une des étapes indispensables avant d’utiliser le chien, c’est de calibrer les pattes. L’équerre donne la position à atteindre et les compensations sont enregistrées. Lorsque les servomoteurs sont calibrés, le chien peut fonctionner normalement.
Ici c’est le servo « gadget » puisqu’il n’actionne que la queue de l’animal.

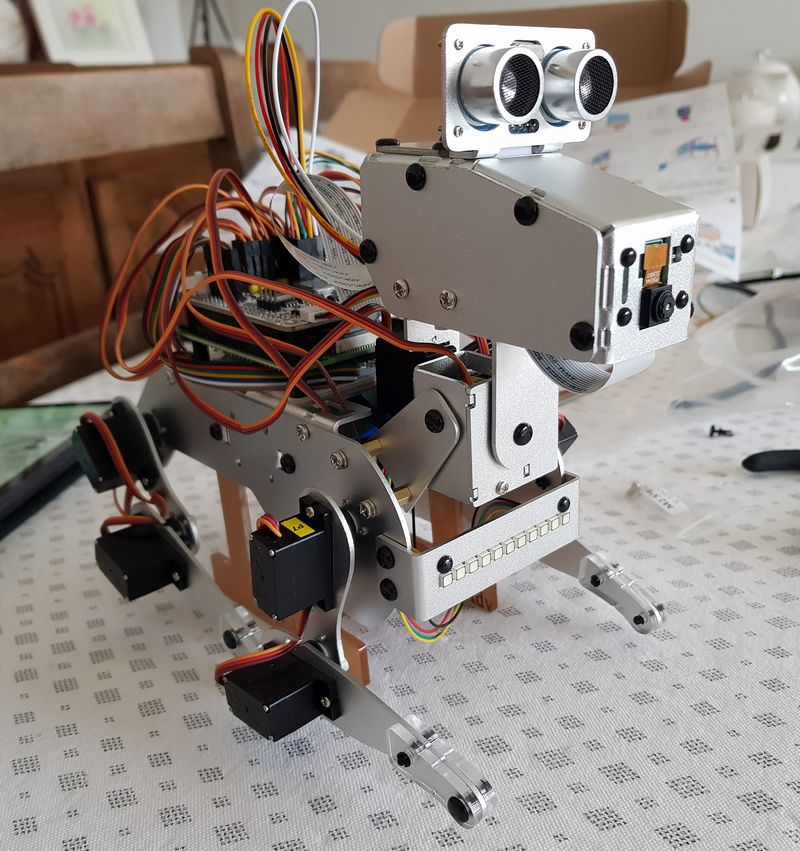
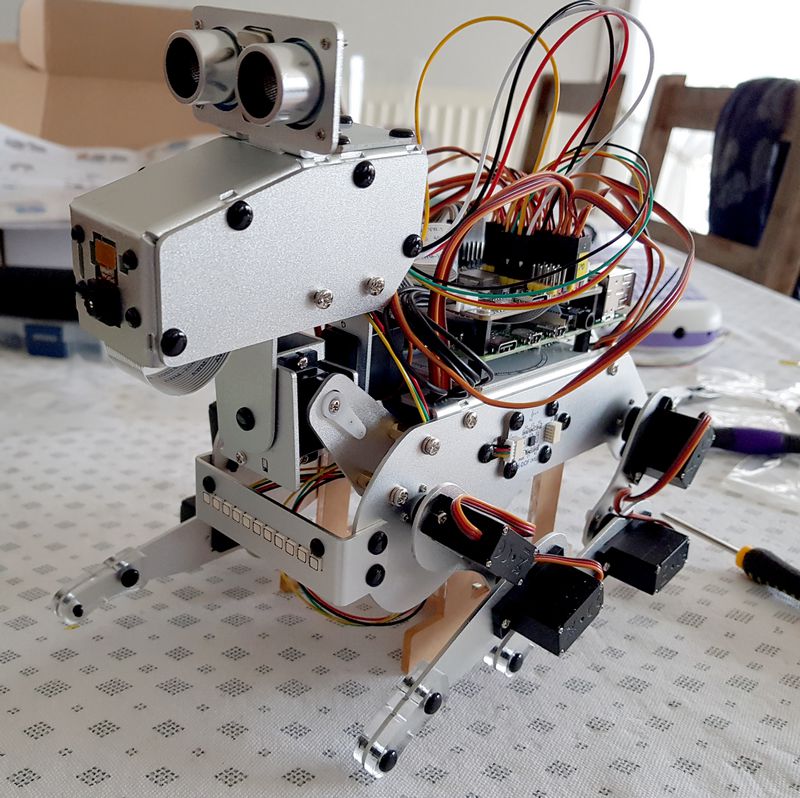
Voilà le chien terminé et prêt pour les essais. La tablette comporte les commandes pour faire déplacer le chien, voir ce qu’il a devant lui ou mesurer la distance avec le capteur à ultrasons.
L’environnement réseau
Le Raspberry Pi doit se connecter à une box pour que le chien puisse être commandé soit depuis un PC, soit depuis la tablette. Dans ce cas on lance sur le Raspberry Pi une appli qui attend les ordres de la tablette. A la maison ça ne pose pas trop de problème car la box internet est présente. Sur les salons et expositions c’est une autre paire de manches car le WiFi est souvent « pourri », enfin, saturé et ce qu’on connecte sur le WiFi à destination des exposants a bien du mal à fonctionner. J’ai donc créé mon propre réseau :
 Le routeur Xiaomi R4A (moins de 30€ et il fait le 2,4GHz et le 5GHz) a été reprogrammé avec OpenWRT. Il crée un point d’accès auquel le chien se connecte en 5GHz, fréquence peu utilisée sur les salons. Quand il est en recherche de connexion, la LED User du chien clignote. Quand il est connecté et a pris la bonne adresse (il a une adresse fixe en réservation), il aboie trois fois. Comme ça même si je suis en train de monter le stand, je sais que le routeur fonctionne bien et que le chien vient de se connecter.
Le routeur Xiaomi R4A (moins de 30€ et il fait le 2,4GHz et le 5GHz) a été reprogrammé avec OpenWRT. Il crée un point d’accès auquel le chien se connecte en 5GHz, fréquence peu utilisée sur les salons. Quand il est en recherche de connexion, la LED User du chien clignote. Quand il est connecté et a pris la bonne adresse (il a une adresse fixe en réservation), il aboie trois fois. Comme ça même si je suis en train de monter le stand, je sais que le routeur fonctionne bien et que le chien vient de se connecter.
Après j’utilise un CrowPi L, un Raspberry Pi 4 dans un boîtier de portable, pour me connecter au chien en SSH, lancer les programmes, piloter les actions depuis le clavier. Enfin si je lance l’appli qui attend les ordres de la tablette, le chien est commandé depuis la tablette et renvoie le flux vidéo qui s’affiche sur l’écran. C’est ce que préfèrent les enfants qui utilisent cet ensemble…
Le chien en action
Vidéo d’origine
premiers essais
Tests à la maison
Le stand framboise314 à Fest’INC de Loos en Gohelle 2023
Conclusion
Voilà un robot bien sympathique. Adapté pour des enfants de 10 ou 12 ans accompagnés. Le montage est quand même délicat. La charge dure 2 à 3 heures pour un peu plus d’une heure d’utilisation. La structure entièrement en aluminium garantit une bonne solidité.
Après, la configuration et l’utilisation ne sont pas forcément simples et il faudra un certain nombre de connaissances en réseau pour exploiter la bête.
J’ai toujours trouvé que les enfants à qui je confiais ce chien pour le piloter s’en sortaient bien, et appréciaient la découverte de la robotique au travers de ce modèle.
Pour la programmation en Python, il faudra être en accompagnement mais on trouve beaucoup d’exemples déjà disponibles, ce qui aidera le démarrage.
Sources
Page d’informations sur PiDog :
https://pidog.sunfounder.com/?ref=HoiTVi03
Le PiDog est en vente pour 179.99$ :
SunFounder PiDog Robot Dog Kit for Raspberry Pi
Documentation PiDog
https://docs.sunfounder.com/projects/pidog/en/latest/?ref=HoiTVi03
Ping : PiDog le chien robot de Sunfounder
Très sympa, comme beaucoup de produits SunFounder.
J’ai un robot sur roues que je n’ai pas terminé, mais dont la qualité de fabrication dépasse la concurrence, c’est évident.
La question que je me pose (puisque je n’ai pas regardé en détail) : quelle part de « liberté » a-t-on ? J’imagine qu’il y a du code de base, qu’on peut se contenter de recopier/télécharger. Mais après ? La robotique c’est bien surtout quand on peut y apporter sa propre réflexion. Est-ce abordable pour un jeune par exemple ? Les protocoles, l’électronique est standard et évolutive, les bibliothèques accessibles ?
En tous les cas il est très chouette et c’est une belle prouesse que de le proposer à ce prix.
Bonjour
A mon avis il faut deja une certaine expérience pour programmer ce robot
Son utilisation par des scolaires ne pose pas de probleme avec la tablette ou en lancant les ordres depuis un menu sur le pc
Pour la prog en python je pense qu on doit viser le niveau 3 eme ou seconde
Mais c est juste mon avis
Vous aves les infos en ligne sur le site et le wiki Sunfounder…
Cdt
Francois
Bonjour,
Peut-on trouver un revendeur en France ?
Merci
Bonjour
A ma connaissance non
Désolé