

 Pi-Pan est un projet en cours sur KICKSTARTER. Il est déjà financé alors qu’il reste 26 jours avant la fin de la période des promesses.
Pi-Pan est un projet en cours sur KICKSTARTER. Il est déjà financé alors qu’il reste 26 jours avant la fin de la période des promesses.
58 personnes ont déjà promis 3400$ alors que la barre était à 1984$.
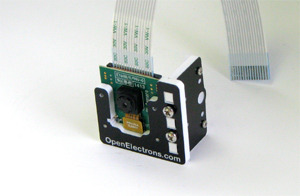
Le projet consiste à monter la caméra sur 2 servomoteurs utilisés pour la faire pivoter sur 2 axes. La caméra peut pratiquement faire un tour complet à l’horizontale, et balayer 110 degrés de haut en bas.
Le projet comprend les plaques de montage pour la caméra et pour les servomoteurs.
 Une plaque de commande des servomoteurs est également en cours de développement
Une plaque de commande des servomoteurs est également en cours de développement
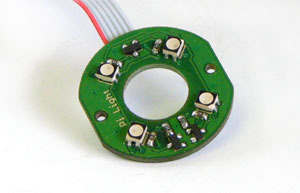
 Ainsi qu’un éclairage optionnel qui vient se placer autour de l’objectif de la caméra. 4 LEDs assurent l’éclairage de la scène.
Ainsi qu’un éclairage optionnel qui vient se placer autour de l’objectif de la caméra. 4 LEDs assurent l’éclairage de la scène.
 Un boîtier assorti est également disponible.
Un boîtier assorti est également disponible.
Une vidéo montre le prototype en action :
37€ livré pour une carte de contrôle + 2 servos + supports, c’est vrai que c’est un peu cher.
Il n’empêche qu’ils répondent à un vrai besoin au vu du succès des fond récoltés !
Ce qui à mon sens pourrait justifier une telle somme, serait de mettre à disposition une interface simple et à la portée de tous pour réaliser des panoramiques. Mais l’on ne sait pas grand chose sur la partie logicielle…
Gageons qu’un projet Open source nous permettra bientôt de réaliser la même chose … à moindre coûts 😉
Bonjour Simon
Oui vu le prix des servomoteurs sur ebay et le peu de matériel à mettre en œuvre pour les assembler (un bout de cornière alu ?) ça m’a semblé un peu disproportionné
Cordialement
François
Hello,
Attention n’oubliez pas que ce projet est industrialisé, vous ne pouvez pas comparer son prix à celui d’un prototype réalisé sur un coin de table!
La réalisation d’une carte électronique en série, par exemple, entraine des frais d’outillage et de câblage.
et les servos nécessaires à ce projet en quantités élevées ne sont probablement pas achetables comme un particulier sur ebay.
donc le prix ne me parait pas disproportionné pour une réalisation en petite série.
@f4grx
Bonjour
C’est vrai pour la carte de pilotage et la carte LEDs.
Pour les servos et leur support le DIY (Fézitoimême) me semble jouable.
Cordialement
François
Salut , surtout que : « Les servomoteurs ainsi que les LEDs sont pilotés par un programme en Python fourni également. »
Python a pas besoin de carte de pilotage pour commander 2 servos alors soit ils fournissent une carte histoire de justifier le prix ou soit il savent pas programmer (et le pire c’est qu’ils utilisent servoblaster qui sert justement a faire ca sans carte , encore pire , python sait le faire sans servoblaster… leur carte c’est vraiment du cinema) , dans les 2 cas c’est inquietant.
hello !
moi perso si ils vendent le carte LED APACHER… je suis fortement preneur !!!
😀
après l’ensemble peu être sympa aussi, si ils baissent un peu leur prix, pour un cadeau de noël, pourquoi pas !
mais bon, faut voir car avec BCP de simplicité tous les APN/Smartphone font du bon pano maintenant…
et c’est pas obligatoirement facile de sortir avec tout son barda@Pi ! ^^
Bonjour
Pour les LEDs il y aurait des trucs sympa à tester par exemple http://dx.com/p/t10-15-led-white-light-car-angel-eye-60mm-diameter-25513. Pour le reste avec 2 servos on doit pouvoir le faire en DIY (fézitoimême) !
cordialement
François
Bonjour,
Nous avons déjà pris contact avec vous dans le cadre de notre projet.
Nous utilisons en ce moment le servo moteur ! Mais les images de la caméra sont à l’envers sur le raspberry, avez vous ce problème là? Je viens de vérifier le servo moteur est bien monté.
Cordialement
Coralie MESTRE
Bonjour
utilisez les options suivantes avec raspistill ou raspivid (RTFM)
‐rot, ‐‐ rotation : Set image rotation (0 ‐359)
‐hf, ‐‐ hflip : Set horizontal flip
‐vf, ‐‐ vflip : Set vertical flip
vous permettent de tourner l’image si vous n’avez pas monté la caméra dans le « bon sens ». Dites moi si vous êtes arrivée au résultat…
cordialement
François
Oui on peut faire ça, mais on l’a monté exactement comme vous mais la caméra est à l’envers! Nous utilisons pas tout le temps raspistill mais un module qui a été développé pour la vidéo.
On peut essayer de vous faire parvenir une photo mais c ‘est exactement comme les votre. Vous elle n’apparaît pas à l’envers?
Merci pour cette réponse rapide.
Cordialement
Coralie Mestre
Oui l’image est « à l’envers » quand le câble de la caméra sort vers le haut. Comme j’utilise raspivid ça ne pose pas de problème pour retourner l’image. Je ne vois que la solution de retourner physiquement la caméra (si mécaniquement ça fonctionne avec le câble dans ce sens) si vous ne pouvez pas modifier l’orientation de l’image au niveau du module de traitement de la vidéo.
Cordialement
François
Ping : The MagPi N° 20 est sorti ! | Framboise 314, le Raspberry Pi à la sauce française….
Bonjour,
j’ai un projet à réaliser qui consiste à permettre, sur internet grâce a l’ip de ma raspberry, de voir le streaming prise par la camera pi et aussi de la piloter grâce a 2 servomoteur mais je ne sais pas du tout par où commencer pour piloter les servomoteurs. Pour l’instant je me renseigne sur le langage python
mais je voit pas ce qu’il faut faire en tout premier.
Bonjour Marc
Vous trouverez PiPan http://www.openelectrons.com/index.php?module=pagemaster&PAGE_user_op=view_page&PAGE_id=15 ainsi que les logiciels en python à télécharger
cordialement
François
merci, j’ai commencé à lire et je croit c’est exactement ce dont j’avais besoins.