

 Dominique (Domi sur le forum de framboise314) a réalisé une liaison 2,4 GHz entre un Raspberry Pi et un Arduino Nano.
Dominique (Domi sur le forum de framboise314) a réalisé une liaison 2,4 GHz entre un Raspberry Pi et un Arduino Nano.
Il a publié son tutoriel sur le forum et vous pouvez le lire directement. Dominique m’a gentiment proposé de reprendre son tutoriel sur le blog pour le mettre à disposition de tous les lecteurs. Voilà qui est chose faite. Merci à Dominique pour ce partage ! Attention, ce tutoriel nécessite d’avoir quelques connaissances en ligne commande et en compilation de programme… 😉 Si vous êtes un « vrai » débutant mettez l’adresse dans vos favoris et revenez un peu plus tard.

Différentes déclinaisons du circuit nRF24L01
Au sommaire :
Liaison 2,4 GHz entre Raspberry Pi et Arduino
Je laisse la parole à Dominique :
Recherchant un moyen de relier des capteurs autonomes à un Raspberry Pi. Mon choix s’est orienté sur l’utilisation d’un Arduino Nano. Petit mais suffisamment puissant pour être autonome, effectuer différents relevés, mais également effectuer des actions comme par exemple piloter un relais.
Pour communiquer avec le Raspberry Pi, j’ai choisi d’utiliser des modules nRF24L01, module de liaison Hertzienne à 2,4 Ghz.
Le circuit nRF24L01
But recherché
Le but de ce tutoriel est de faire dialoguer un Raspberry Pi et un Arduino Nano.
Nous allons voir comment réaliser l’installation de la bibliothèque RF24, le câblage, ainsi que la configuration du Raspberry et de l’Arduino Nano.
Les programmes en C++ sont une adaptation de programmes trouvés en exemple sur Internet, je les ai adaptés à mon besoin.
Principe de fonctionnement souhaité
Le principe de fonctionnement de ce tutoriel est de piloter depuis un Raspberry Pi, une LED pilotée par l’Arduino Nano, ce dernier retourne au Raspberry Pi un état de la commande pour indiquer sa bonne exécution, ou pas.
- Allumage de la LED
- On envoie dans une commande une chaine JSON au Raspberry Pi, celui ci l’interprète, puis envoie à l’Arduino Nano via le nRF24L01 la commande d’allumage de la led (envoi du N° d’ID attribué au nRF24L01 du Nano + commande « ON » ).
- L’Arduino Nano reçoit la commande, allume la LED, et retourne sont état au RasPi.
- Le RasPi reçoit l’état de la LED, le programme reconstruit une chaine JSON de retour avec la valeur de retour pour l’utilisateur (« TRUE » ou « FALSE« ), ainsi que l’état de la LED (« ON » ou « OFF« )
- Extinction de la LED
- Idem ci dessus, mais envoi d’une commande « OFF«
- Demander l’état de la LED
- Le Raspberry Pi envoie une demande à l’Arduino Nano pour connaitre l’état de la LED (envoi du N° d’ID attribué au nRF24L01 du Nano + commande « GET« ).
- L’Arduino Nano lit l’état de la LED qu’il a en mémoire, et le retourne au RasPi.
- Le RasPi reçoit l’état de la LED, le programme reconstruit une chaine JSON de retour avec la valeur de retour (« TRUE » ou « FALSE ») ainsi que l’état de la LED (« ON » ou « OFF »)
Passons maintenant à la partie technique, installation et configuration du matériel.
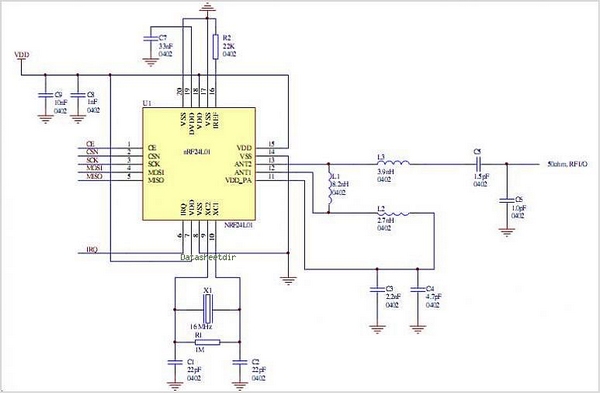
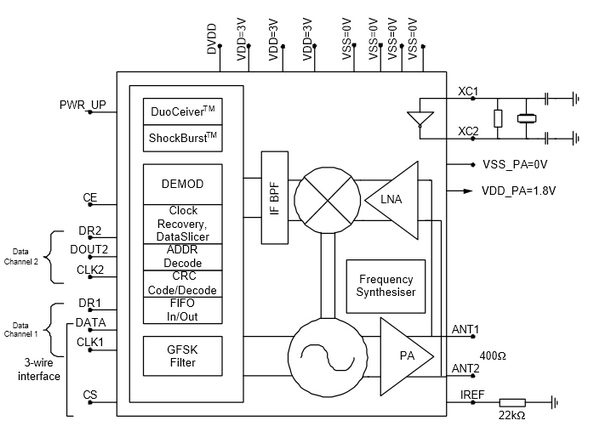
Schéma d’une carte nRF24L01
Mise à jour du système
Avant toute installation, on commence par mettre à jour le système :
$ sudo apt-get update $ sudo apt-get upgrade $ sudo apt-get dist-upgrade
Préparation du système
Installation de SPI
Afin d’assurer une bonne stabilité de l’interface SPI, il est préférable d’annuler l’overcloking si vous l’avez activé sur votre système… Il sera possible une fois que l’ensemble sera fonctionnel, de tenter une réactivation de l’overclock. Mais par sécurité, il vaut mieux d’abord installer l’ensemble, et le faire fonctionner dans des conditions normales et sur un système sain, et seulement après retenter un overclockage.
Pour activer l’interface SPI, il faut lancer la commande :
$ sudo raspi-config
Aller dans le menu des options avancées (menu « Advanced Options »), puis dans le sous-menu, sélectionner « SPI« , et cliquer sur « Oui » pour activer le SPI.
Il est ensuite demandé si l’on souhaite charger le module SPI avec le Noyau, répondre « OUI »
Quitter l’utilitaire « Raspi-config ». Rebooter le système.
nRF24L01 : Implantation des composants
Après le redémarrage, on va autoriser l’accès à SPI. Pour cela, éditer le fichier « raspi-blacklist.conf » :
$ sudo nano /etc/modprobe.d/raspi-blacklist.conf
Attention, dans les dernières versions de Raspbian, j’ai remarqué que ce fichier n’existe plus, ou qu’il est vide, il n’y a donc plus rien à modifier dedans. Passer directement à la suite du prochain reboot sans suivre les modifications du fichier.
Si le fichier n’est pas vide, vérifier si la ligne ci-dessous existe :
blacklist spi-bcm2708
Dans ce cas, il faut la commenter en ajoutant un « # » devant :
#blacklist spi-bcm2708
On enregistre, on quitte l’éditeur, et on reboot le Raspberry.
Au redémarrage, on vérifie que le SPI est bien activé :
pi@raspberrypi ~ $ ls -la /dev/spi* crw-rw---T 1 root spi 153, 0 janv. 1 1970 /dev/spidev0.0 crw-rw---T 1 root spi 153, 1 janv. 1 1970 /dev/spidev0.1
Si on voit apparaître les « /dev/spi* » , c’est que la configuration est correcte.
Installation de la bibliothèque
Créer un dossier que l’on nommera « nrf24l01 » dans le « home directory » de l’utilisateur « pi« . Importer la bibliothèque RF24, et la compiler de la façon suivante.
$ cd $ mkdir nrf24l01 $ cd nrf24l01 $ git clone https://github.com/TMRh20/RF24.git $ cd RF24 $ make $ sudo make install
On installe la librairie « JSON » que l’on va utiliser dans notre script de communication :
$ sudo apt-get install libjson0-dev
Revenir dans le dossier nrf24l01
$ cd ~/nrf24l01
Copier les fichiers « Makefile » et « sender.cpp » que vous trouverez dans le ZIP « nRF24L01_Raspberry » en bas de ce tutoriel.
Compiler le fichier à l’aide de la commande « make »
$ make

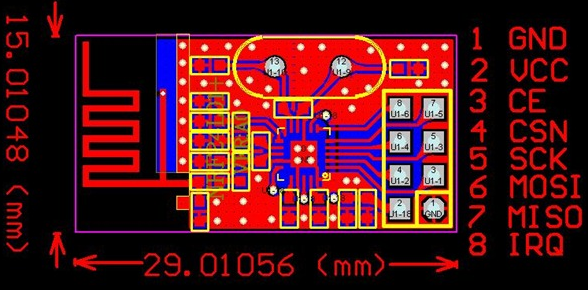
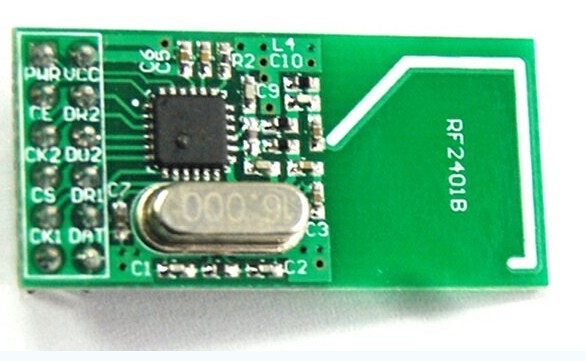
nRF24L01 équipé d’une antenne
Installation matérielle
Le Raspberry Pi
Connexions entre le Raspberry Pi et le nRF24L01
Éteignez le Raspberry Pi avant de lui connecter physiquement le module nRF24L01. Ceci évitera d’éventuelles destructions de ports…
L’exemple est ici avec un Raspberry Type B, mais les connexions sont identiques avec un A, A+, B+ ou Pi2
Connexion sur le Raspberry, les connexions aux broches ci-dessous ne peuvent être changées :
- Pin 19 = MOSI du Raspberry vers MOSI (pin 6) du nRF24L01.
- Pin 21 = MISO du Raspberry vers MISO (pin 7) du nRF24L01.
- Pin 23 = SCLK du Raspberry vers SCK (pin 5) du nRF24L01.
- Pin 24 = CE0 du Raspberry vers CSN (pin 4) du nRF24L01. (Peut éventuellement être connecté sur pin 26 du Raspberry, mais les scripts devront être adaptés).
La connexion du +3,3v, pin 2 du nRF24L01 est prise dans ce schéma sur le pin 1 du Raspberry. Cette alimentation peut être prise sur tout autre pin du Raspberry fournissant du 3,3v (pin 1 ou 17).
La connexion GND, pin 1 du nRF24L01 peut être prise partout ou il y a une pin GND sur le Raspberry.
- Reste la pin 22 du Raspberry, il s’agit d’un port GPIO. Si celui ci est déjà utilisé, on peut prendre n’importe quel port GPIO. Il faudra pour cela adapter le script « sender.cpp » puis le recompiler.
Dans le script, changer la ligne :
RF24 radio(RPI_V2_GPIO_P1_22, RPI_V2_GPIO_P1_24, BCM2835_SPI_SPEED_16MHZ);
en adaptant « RPI_V2_GPIO_P1_22″ en fonction du pin GPIO connecté.
Exemple : « RPI_V2_GPIO_P1_11″ pour le GPIO 0.
Avant de remettre le Raspberry Pi sous tension, faites une nouvelle vérification de vos connexions…
L’Arduino Nano
Nous allons installer le module nRF24L01 sur un Arduino Nano. C’est ce dernier qui recevra l’ordre du Raspberry Pi lui demandant d’allumer ou d’éteindre la LED.
Le tutoriel est ici donné avec un Arduino Nano, mais toute autre carte Arduino fera l’affaire, en respectant les connexions ci-dessous.
Voici le schéma du câblage entre l’Arduino Nano et le nRF24L01
Connexions entre l’Arduino Nano et le nRF24L01
Connexion sur l’Arduino Nano, les connexions aux broches ci-dessous ne peuvent être changées :
- Pin D11 du Nano vers MOSI (pin 6) du nRF24L01.
- Pin D12 du Nano vers MISO (pin 7) du nRF24L01.
- Pin D13 du Nano vers SCK (pin 5) du nRF24L01.
Connexions pouvant être effectuées sur d’autre pin, mais qui devront être adaptées dans le code du Croquis exporté vers l’Arduino Nano.
- Pin D10 du Nano vers CSN (pin 4) du nRF24L01.
- Pin D9 du Nano vers CE (pin 3) du nRF24L01.
- Pin D6 du Nano vers l’anode de la LED.
- L’alimentation du +3,3v, pin 2 du nRF24L01 est prise dans ce schéma sur le pin +3,3v du Nano.
Pour effectuer les connexions D10, D9 ou D6 à un autre pin, il faut ouvrir le croquis Arduino (.ino) et adapter les lignes suivantes :
#define RF_CE 9 #define RF_CSN 10 #define LED_PIN 6
Les Programmes
Programme Raspberry Pi
Le programme du Raspberry Pi permet d’envoyer via le nRF24L01, un ordre d’allumage ou d’extinction d’une LED. Cette dernière est commandée par notre Arduino Nano, l’ordre d’allumage et d’extinction est donc envoyé par le Raspberry Pi, vers Arduino Nano.
Le programme est écrit en C++, il utilise la bibliothèque RF24, que nous avons installée plus haut dans ce tutoriel.
Le principe est d’envoyer une chaine JSON via la ligne de commande du Raspberry Pi. Cette chaîne est composée de :
{
"to":"1", // id di nRF24L01 vers lequel on envoi la commande.
"message":"get", // commande envoyée au Arduino Nano.
"TTL":"3000" // (paramètre optionnel) "Time out" (si non précisé il sera de 1000 ms).
}
Les messages peuvent être :
set=on // Commande l'allumage de la LED set=off // Commande l'extinction de la LED get // Demande au Nano quel est l'état de la LED
Exemple de commande envoyée pour commander l’allumage de la LED :
$ sudo ./sender '{"to":"1","message":"set=on"}'
Nous envoyons bien en paramètre une chaîne au format JSON. Le programme du Raspberry Pi s’occupe de transcrire cette chaine afin d’envoyer les commandes à l’Arduino, via le nRF24L01.
Télécharger ci-dessous le ZIP, puis copier les deux fichiers contenus dans l’archive « nRF24L01_Raspberry » vers le dossier « ~/nrf24l01/«
![]() nrf24-raspberry.zip Script pour Raspberry (1.58 Kio)
nrf24-raspberry.zip Script pour Raspberry (1.58 Kio)
Se placer dans le dossier puis compiler le programme.
$ cd ~/nrf24l01 $ make</code>
Le programme sur le Raspberry Pi est maintenant fonctionnel.
Programme Aduino Nano
Le programme de l’Arduino Nano permet de recevoir les commandes envoyées, les interpréter, puis de répondre au Raspberry Pi si la commande est OK ou pas.
Ci-dessous le programme « ino » à charger depuis votre atelier Arduino (IDE).
![]() nrf24-arduino.ino.zip Script pour Arduino (1.28 Kio)
nrf24-arduino.ino.zip Script pour Arduino (1.28 Kio)
Conclusion
Notre montage est maintenant fonctionnel.
Les prochaines étapes seront de remplacer la LED par une sonde de température DS18B20, et donc d’adapter les programmes à ce nouveau périphérique.
Au menu également une sonde DHT 11 ou DHT 22, un détecteur ultrasons de type HC-SR04 (pour remplacer le RasPi dans ma cuve à eau), …. et tout autre détecteur ou sonde dont je pourrais avoir besoin.
Note de framboise314 : Merci Domi pour cette description détaillée qui pourra servir de point de départ à de nombreuses réalisations domotiques !
Sources
Voici quelques liens vers des articles sur la mise en œuvre du nRF24L01. Ce sont des articles de montages ou de programmes, auxquels je me suis inspirés afin d’arriver à ce résultat.
- http://blog.carr3r.com/post/raspberry-p … 1-modules/
- http://hack.lenotta.com/arduino-raspber … -nrf24l01/
- http://www.homautomation.org/2014/06/11 … -nrf24l01/
- https://www.sparkfun.com/datasheets/RF/nRF2401rev1_1.pdf
L’article d’origine se trouve ici :
Jusqu’à quelle distance ça peut communiquer sans antenne ?
Si tu es dans une maison 10 mètres. En champs libre beaucoup plus ( 50 mètres ).
Tu peux aller sur mon site ou je parle de la mise en oeuvre du module. http://www.caron.ws
Pour ma part, j’utilise une antenne du coté serveur et il faut être à 250Kbs pour avoir une meilleure distance. Il y un peu de paramétrage à faire.
Cordialement
Christophe 🙂
Merci !
Très intéressante comme méthode.
Bonjour.
Juste pour information, il existe aussi mysensrs qui utilise le meme materiel.
Couple à Jeedom, ca donne un outil tres fonctionnel.
Merci pour votre article ; j’ai eu quelques difficultées avec le type définissant les pipes, j’ai utilisé la déclaration des exemples de la librairie RF24 et tout fonctionne correctement!
merci pour ce retour ! 😉
Merci pour le tuto.
Tout fonctionne hormis une réponse {« status »: »false », »code »: »6″, »message »: »Wrong ACK »}
Sur la console de l’arduino la répons est ok.
Une idée ?
Merci par avance.
Bonjour Ingfred
Non, pas d’idée
Essayez de poser la question dans le forum sur le tuto de Dominique
cordialement
François
Bonjour,
tout d’abord merci pour ce tutoriel.
Je l’ai suivi entièrement, et lorsque j’essaie d’envoyer un message depuis le Rpi vers l’Arduino,
pi@raspberrypi ~/nrf24l01 $ sudo ./sender ‘{« to »: »1″, »message »: »set=on »}’
j’ai ce message :
{« status »: »false », »code »: »5″, »message »: »Timed-out »}
Les 2 modules MRF24 ne semblent pas arriver à communiquer ensemble.
Avez-vous un conseil à me donner afin de résoudre ce pb et faire allumer cette fameuse LED ?
Merci d’avance pour votre aide.
Sylvain
Bonjour Sylvain.
J’ai eu le même soucis.
En fait les pins utilisé pour les schema de montage ne correspondent pas au pins du programme. de mémoire c’est pour la connexion CE sur le raspi.
Suis désolé de n’être pas plus précis, je n’ai pas le matos sous la main
Bonjour,
J’essai d’installé un module NRF24L01 sur mon RPI2 mais j’ai des erreur lors de la compilation. Après quelques recherches sur Google, je crois avoir compris que la librairie du BCM2835 normalement fait pour le PIB n’est pas compatible avec le PI2 qui utilise un BCM2836!!! Ai-je bien compris ou alors mon anglais est trop limité!?
A cet effet j’ai cherché, trouvé et télécharger un fichier TAR de la librairie pour le PI2 mais comment faire pour le décompresser et le compiler via putty!?
Merci de votre aide.
je me réponds à moi même…
tar xzf fichier.tar.gz
Donc je vais continuer a bidouiller pour voir si j’arrive à compiler cette librairie sans erreur pour utiliser un NRF24L01 en SPI sur mon RPI2.
merci pour le retour
bon courage
cordialement
François
Bonjour,
Je vous remercie pour cet article, dont je me suis servi comme point de départ pour mon projet très simpliste. Néanmoins, après l’avoir lu et relu et après avoir lu de nombreux autres articles sur le sujet, je n’arrive toujours pas à envoyer une valeur quelconque de mon Arduino UNO R3 vers mon RPi2. Pas de sonde de je ne sais quoi! Juste transmettre un entier me comblerait de joie!!
Je pense pourtant avoir bien mis en place:
– le cablage du tout avec « wire jumpers » sur breadboard (en vérifiant l’absence de faux contacts au multimètre et en vérifiant bien les pins du RPi 2 rev 1.1)
– les bons « pipes » (en faisant attention à ce que le pipe « write » sur l’Arduino soit de même adresse que le pipe « read » sur le RPi)
– la bonne déclaration des pins CE et CSN, aussi bien sur le RPi (pin 15 pour GPIO22 et pin 24 pour CE0) que sur l’Arduino (pins 9 et 10)
– le même « radio.CHANNEL() » sur RPi et sur Arduino, en ayant pris soin de vérifier grâce à l’utilitaire « scanner » que j’utilise un canal « libre ».
Je pense que mon Arduino envoie bien les paquets (en tout cas, le programme d’envoi s’exécute normalement) mais par contre mon RPi reste en écoute, sans rien entendre… A noter que radio.details() sur mon RPi n’affiche rien de déconnant (les adresses sont bien définies, etc…). En regardant de plus près dans le code, je vois que « radio.available() » ne renvoie jamais « true »… Je pense pourtant que mon module RF24 du RPi fonctionne, puisque j’arrive à lancer l’utilitaire « scanner ».
J’avoue ne plus savoir quoi tester et me tourne vers vous pour une éventuelle idée.
Je ne sais tellement plus quoi faire que J’en viens à me questionner sur l’existence de parasites électromagnétiques éventuels (après tout, il y a quand même un paquet de trucs qui émettent à 2.4GHz…)… et ce d’autant que j’ai l’impression que mon module sur Arduino ne veut pas émettre s’il est trop près de mon PC portable (OK, j’ai peut-être des hallucinations…)!!
J’ai lu ça et là qu’ajouter une capacité entre les broches 3.3V et GND du module RF24 pouvait résoudre des problèmes en cas de pertes de paquets… mais là, mon RPi ne reçoit pas mes paquets! Pareil, il parait que radio.setPALevel ne devrait pas être mis à MAX, mais plutôt à HIGH…
Bref, je suis perdu… dès la première marche de mon projet! Ca promet…
Merci beaucoup,
Gregala
Bonjour,
Si cela ne fonctionne pas c’est tout simplement parce que le NRF24L01 ne peut supporter des vitesses SPI supérieures à 10MHz (cf datasheet). Le programme pour le Raspberry Pi n’est donc pas bon puisqu’il fixe la vitesse sur le SPI à 16MHz : BCM2835_SPI_SPEED_16MHZ. Si vous la passez à 8MHz : BCM2835_SPI_SPEED_8MHZ tout fonctionnera comme prévu !
Hervé
Merci.
Je teste cela pour voir si le wrong ACK disparait.
Bonjour je cherche à transmettre du signal midi entre des arduino en passant par des RF24 , et je patauge..
à tout hazard quelqu’un sait faire ça?
J’ai un clavier midi qui envoie du signal dans un arduino, lequel est branché sur un rf24 « émetteur », de l’autre coté j’ai un rf24 » récepteur » branché sur un arduino qui doit allumer des leds correspondant aux notes du clavier: les leds s’allument bien mais seulement une fraction de seconde…
j’ai essayé le truc des condensateurs mais ça ne change rien, je pense que c’est dans le code mais caramba!! je ne sais pas quoi..
jérémie
Bonjour Jérémie
Posez la question sur le forum
vous aurez plus d’interlocuteurs que sur une page du blog
cordialement
François
Bonjour,
Enfin un tuto qui marche, j’ai pourtant tout essayé.
Merci.
Bonjour à vous, j’ai un soucis rien ne s’affiche dans mon terminal Raspberry… J’ai toujours une erreur « Timed-Out » … Pourtant j’ai suivi ce tutoriel à la lettre. la commande n’arrive pas à se transmettre à la carte arduino…
Bonjour
est-ce que quelqu’un a tenté d’exploiter ce fameux NRF24 avec une application NodeJS ? J’ai trouvé un module qui est censé fonctionner (https://github.com/natevw/node-nrf) mais après pas mal d’essais je n’arrive toujours pas à récupérer les infos (alors que cela passe avec l’application en C++°
J’ai mis des détails sur Stackoverflow si cela intéresse quelqu’un :
https://stackoverflow.com/questions/35877346/nrf24l01-between-arduino-and-raspberry-pi-in-nodejs
merci pour ce retour frinux
éventuellement postez la question sur le forum, il y a plus de chance d’avoir une réponse que sur cette page qui date un peu et ne doit pas recevoir énormément de visites
cordialement
François
Merci pour la réactivité, j’ai laissé un message sur le forum : http://forums.framboise314.fr/viewtopic.php?f=65&t=2217
Bonjour,
Merci pour tuto,
Suivi a la lettre tout fonctionne. En 3H! pas mal.
Par contre il y a une clarification nécessaire le tuto dis:
en adaptant « RPI_V2_GPIO_P1_22″ en fonction du pin GPIO connecté.
Exemple : « RPI_V2_GPIO_P1_11″ pour le GPIO 0.
Mais après téléchargement le script tel-quel c’est RPI_V2_GPIO_P1_15 (et non pas 22)
changer le 15 pour 22 suivre exactement le schema et le tuto et ca roule
(c’est un peu confus car PIN15=GPIO22 et PIN22=GPIO25, mais le script parle en numéro de PIN pas de GPIO)
Aussi sur l’Arduino j’avais une erreur de compilation par manque de lib.
nrf24-arduino ne suffit pas il faut les *.h et *.cpp Mais en cherchant un peu on comprend que c’est la meme lib que celle chargée sur le raspberry pi, il suffit de les copier et ca roule (le tuto ne le disais pas). Mais bon faut bien un peu de recherche perso sinon c’est pas fun 😉
Merci
Bonjour Guy
merci pour ces précisions !
cordialement
François
==Bonjour je ne suis pas l’auteur du message comme indiqué ci-dessus ==
== Guy n’a pas pu laisser ce commentaire car le firewall le refuse ==
== sans doute à cause du code qu’il contient 🙁 ==
== Je laisse la parole à Guy et je le remercie pour ce complément ==
== Vous pouvez télécharger le programme ICI ==
=======================================================================
Bonsoir,
Depuis hier: J’ai réussi a augmenter la portée en réduisant la vitesse a 250Kbps (était a 1Mbps). J’ai une portée de 15m a travers plusieurs murs, pas encore essayé en extérieur. C’est setDataRate dans RF24.cpp qu’il faut modifier; il faut ensuite tout recompiler (+ réinstaller les lib [make install] sur le raspberry pi).
Et surtout j’ai modifié le code de l’arduino pour pouvoir lire des capteurs de temperature 1wire DS1820 (comme plusieurs en parlaient ici). Le code est ci-dessous. Toute les commandes JSON sont conservées (get, set on, set off) et la commande tmp est ajoutée. A chaque requête « tmp » l’arduino répond en envoyant la temperature lu sur le premier capteur (18S20 ou 18B20) qu’il trouve, a la requête suivante c’est le second et ainsi de suite, quand il n’y en a plus il réponds « no more address ». Ainsi avec 1 seul capteur on aura 1 fois la temperature et la fois suivante le message « no more address » ainsi de suite. Testé OK avec 0, 1, 2 et 3 capteurs, mix 18S20 et 18B20. A raccorder sur la pin8 de l’arduino avec la resistance de 4.7k qui va bien. Nécessite la lib OneWire (bien sur) officielle Arduino. De + il faut passer le timeout de 1000 a 2000ms dans le code du Pi car la conversion de temperature met environ 1s et sinon le Pi passe en timeout.
#include#include "nRF24L01.h"
#include "RF24.h"
#include "printf.h"
/* Définition des Pins CE, CSN et connexion de la LED sur ARDUINO */
#define RF_CE 9
#define RF_CSN 10
#define LED_PIN 6
RF24 radio(RF_CE,RF_CSN);
/* Définition de l'id de l'Arduino */
byte myID = 0x01;
byte pipes[][7] = {"master","slave","idle"};
struct payload_request_t
{
uint8_t number;
uint8_t destination;
char message[14];
};
struct payload_general_t
{
uint8_t number;
char message[15];
};
payload_request_t incoming;
payload_general_t outgoing;
// Guy Avril 2016 Temperature 1wire readings sent to radio
#include
char buffer[255];
boolean NoMoreAddress;
OneWire ds(8); // on pin 8 (a 4.7K resistor is necessary)
void ReadOneWireTemp(void) {
byte addr[8];
byte i;
byte present = 0;
byte type_s;
byte data[12];
float celsius;
if ( !ds.search(addr)) {
Serial.print("No more addresses.\n");
ds.reset_search();
NoMoreAddress = true;
return;
}
NoMoreAddress = false;
Serial.print("ROM =");
for( i = 0; i < 8; i++) { Serial.write(' '); Serial.print(addr[i], HEX); } if ( OneWire::crc8( addr, 7) != addr[7]) { Serial.print("CRC is not valid!\n"); return; } // the first ROM byte indicates which chip switch (addr[0]) { case 0x10: Serial.println(" Chip = DS18S20"); // or old DS1820 type_s = 1; break; case 0x28: Serial.println(" Chip = DS18B20"); type_s = 0; break; case 0x22: Serial.println(" Chip = DS1822"); type_s = 0; break; default: Serial.println("Device is not a DS18x20 family device."); return; } ds.reset(); ds.select(addr); ds.write(0x44,1); // start conversion, with parasite power on at the end delay(1000); // maybe 750ms is enough, maybe not // we might do a ds.depower() here, but the reset will take care of t. present = ds.reset(); ds.select(addr); ds.write(0xBE); // Read Scratchpad Serial.print(" Data = "); Serial.print(present,HEX); Serial.print(" "); for ( i = 0; i < 9; i++) { // we need 9 bytes data[i] = ds.read(); Serial.print(data[i], HEX); Serial.print(" "); } Serial.print(" CRC="); Serial.print( OneWire::crc8( data, 8), HEX); Serial.println(); // Convert the data to actual temperature // because the result is a 16 bit signed integer, it should // be stored to an "int16_t" type, which is always 16 bits // even when compiled on a 32 bit processor. int16_t raw = (data[1] << 8) | data[0]; if (type_s) { raw = raw << 3; // 9 bit resolution default if (data[7] == 0x10) { // "count remain" gives full 12 bit resolution raw = (raw & 0xFFF0) + 12 - data[6]; } } else { byte cfg = (data[4] & 0x60); // at lower res, the low bits are undefined, so let's zero them if (cfg == 0x00) raw = raw & ~7; // 9 bit resolution, 93.75 ms else if (cfg == 0x20) raw = raw & ~3; // 10 bit res, 187.5 ms else if (cfg == 0x40) raw = raw & ~1; // 11 bit res, 375 ms //// default is 12 bit resolution, 750 ms conversion time } celsius = (float)raw / 16.0; Serial.print(" Temperature = "); Serial.print(celsius); Serial.print(" Celsius, "); dtostrf(celsius, 6, 4, buffer); } /* Envoi de la réponse */ /* ******************* */ void sendReply() { /* Message visible si la console est ouverte */ Serial.print("Message de retour de la commande \""); Serial.print(outgoing.message); Serial.println("\""); /* Retour de la reponse au demandeur */ radio.stopListening(); radio.openWritingPipe(pipes[1]); delay(10); radio.write(&outgoing,sizeof(payload_general_t)+1); delay(10); radio.startListening(); } /* Par défaut, la LED est enregistrée à l'état "off" */ byte last = 0; /* Initialisation du programme */ /* *************************** */ void setup() { Serial.begin(9600); /* Définition de pin de la LED comme SORTIE */ pinMode(LED_PIN, OUTPUT); /* On met le pin à l'état éteind */ digitalWrite(LED_PIN, LOW); printf_begin(); radio.begin(); radio.setAutoAck(1); radio.setRetries(1,3); radio.enableDynamicPayloads(); radio.openWritingPipe(pipes[1]); radio.openReadingPipe(1, pipes[0]); radio.startListening(); radio.printDetails(); } /* Boucle de "travail" */ /* ******************* */ void loop(void) { if(radio.available()) { radio.read(&incoming, sizeof(payload_request_t)); /* Affichage de la commande demandée dans la console */ Serial.print("Commande recu \""); Serial.println(incoming.message); /* Aduino vérifie que c'est bien à son ID que la demande s'adresse / if (incoming.destination==myID) { /* Si le message est "get", on retourne l'état enregistré de la LED / if (strncmp(incoming.message, "get", 3) == 0) { if (last > 0)
strcpy(outgoing.message, "on");
else
strcpy(outgoing.message, "off");
/* Sinon, la commande est t'elle de type "set" */
} else if (strncmp(incoming.message, "set", 3) == 0) {
if (strncmp(&incoming.message[4], "on", 2)==0) {
/* Si la commande est "on", on allume la LED */
digitalWrite(LED_PIN, HIGH);
last = 1;
strcpy(outgoing.message, "ok");
} else if (strncmp(&incoming.message[4], "off", 3)==0) {
/* Si la commande est "off", on éteind la LED */
digitalWrite(LED_PIN, LOW);
last = 0;
strcpy(outgoing.message, "ok");
} else
/* Sinon, Commande inconnue, ni"on", ni "off" */
strcpy(outgoing.message, "?");
/* Sinon, la commande est t'elle de type "tmp" (temperature) */
} else if (strncmp(incoming.message, "tmp", 3) == 0) {
ReadOneWireTemp();
if (!NoMoreAddress) {
strcpy(outgoing.message, buffer);
} else
strcpy(outgoing.message, "No more address");
/* Sinon, Commande inconnue, ni "get", ni "set" */
} else {
strcpy(outgoing.message, "?");
}
/* On retourne le résultat du traitement */
outgoing.number = incoming.number;
sendReply();
}
}
delay(100);
}
Bonjour , je n’ai pas copier et extrait les fichier mais je les est crée et édité correctement mais la commande make ne marche marche je ne comprend pas d’ou ça viens j’ai fais exactement le tuto . Je suis sur RPI2 apparemment ça viendrais de la lib mais comment corriger cela ? ..
Merci
Bonsoir,
il m’est impossible d’installer proprement la bibliothèque RF24.
Je bute à chaque fois à la commande make.
ça me donne ça :
cc1plus: error: bad value (cortex-a7) for -mtune switch
Makefile:40: recipe for target ‘RF24.o’ failed
make: *** [RF24.o] Error 1
Pourriez vous m’aiguiller ?
Merci beaucoup
Bonjour,
une petite précision qui pourrait avoir son importance.
Certaines nano à bas prix n’ont pas de pin 3.3V, la broche existe mais envoie du 5V.
Cependant, pas de panique, les modules radio utilisés ici supportent parfaitement le 5V en alimentation.
Concernant la portée, elle peut atteindre une centaine de mètres voire même près d’un kilomètre avec des modules munis d’antenne spécifique et dans des conditions optimales (testé en pleine mer).
Pour avoir une puissance maximale du signal d’émission, il faut ajouter Mirf.configRegister(RF_SETUP, 0x26); dans le paramétrage du module émetteur. La vitesse de transmission sera faible mais la puissance de sortie passe à 0dBm (soit le maximum)
merci pour cette précision Lionel 🙂
Bonjour,
Merci pour ce tutoriel.
Ca marche bien de mon coté avec les modules alimentés en USB. Cependant, quand j’ai voulu installé mes modules avec une alimentation externe, ca ne marche plus.
La raison est simple : le 3.3V est fournit par le chip FTDI qui assure la connection usb. Ce chip est alimenté directement par le 5V fournit par la prise USB.
Le 5V qui alimente le reste de la carte peut provenir des différentes sources d’alimentations (usb, VIN), mais est séparé du 5V USB par une diode (MBR0520)
(cf https://www.arduino.cc/en/uploads/Main/ArduinoNano30Schematic.pdf)
L’objectif de cette diode est de protéger l’ordinateur d’un « retour » indésirable par le 5V (si par exemple on branche a la fois l’alimentation VIN et l’USB) et d’éviter aussi de consommer inutilement (le FTDI ne sert a rien)
Quand on alimente le nano par VIN, le plus simple est d’ajouter son propre régulateur pour avoir les 3.3V.
Cependant dans mon cas, je n’ai pas la place de rajouter ce régulateur … Je cherche donc une solution pour récupérer le 3.3V …
J’ai l’impression que si on « court-circuite » cette diode, on devrait réglementer le chip FTDI et avoir a nouveau du 3.3V disponible ?
Est ce que quelqu’un la déjà fait ? Avez vous un avis.
Attention, il est évident que si on court circuite la diode, il ne faut pas brancher en même temps, l’USB et l’alimentation externe VIN.
Merci pour vos retours.
Le tuto est bien mais c’est pas terrible de brancher une led directement entre une sortie de l’arduino et la masse, il faudrait y ajouter une résistance histoire de ne pas flinguer la led ou la sortie de l’arduino…
Bonjour,
Je débute avec RASPBERRY et linux. J ai essayé le tuto avec une version « neuve de jessie » sur mon RASPBERRY modele B+ et comme je n’y arrivait pas, j’ai formatté et installe la derniere version PIXEL, mais j’ai le même méssage d’erreure ci-dessous :
g++ -o sender -Wall -I../ sender.cpp -Ofast -mfpu=vfp -mfloat-abi=hard -march=armv6zk -mtune=arm1176jzf-s -l json -l rf24-bcm
sender.cpp:10:12: error: ‘RPI_V2_GPIO_P1_15’ was not declared in this scope
RF24 radio(RPI_V2_GPIO_P1_15, RPI_V2_GPIO_P1_24, BCM2835_SPI_SPEED_16MHZ);
^
sender.cpp:10:31: error: ‘RPI_V2_GPIO_P1_24’ was not declared in this scope
RF24 radio(RPI_V2_GPIO_P1_15, RPI_V2_GPIO_P1_24, BCM2835_SPI_SPEED_16MHZ);
^
sender.cpp:10:50: error: ‘BCM2835_SPI_SPEED_16MHZ’ was not declared in this scope
RF24 radio(RPI_V2_GPIO_P1_15, RPI_V2_GPIO_P1_24, BCM2835_SPI_SPEED_16MHZ);
^
sender.cpp: In function ‘int main(int, char**)’:
sender.cpp:70:24: warning: ‘json_object* json_object_object_get(json_object*, const char*)’ is deprecated (declared at /usr/include/json/json_object.h:271) [-Wdeprecated-declarations]
json_object * key = json_object_object_get(jobj, « to »);
^
sender.cpp:70:57: warning: ‘json_object* json_object_object_get(json_object*, const char*)’ is deprecated (declared at /usr/include/json/json_object.h:271) [-Wdeprecated-declarations]
json_object * key = json_object_object_get(jobj, « to »);
^
sender.cpp:77:10: warning: ‘json_object* json_object_object_get(json_object*, const char*)’ is deprecated (declared at /usr/include/json/json_object.h:271) [-Wdeprecated-declarations]
key = json_object_object_get(jobj, « message »);
^
sender.cpp:77:48: warning: ‘json_object* json_object_object_get(json_object*, const char*)’ is deprecated (declared at /usr/include/json/json_object.h:271) [-Wdeprecated-declarations]
key = json_object_object_get(jobj, « message »);
^
sender.cpp:84:10: warning: ‘json_object* json_object_object_get(json_object*, const char*)’ is deprecated (declared at /usr/include/json/json_object.h:271) [-Wdeprecated-declarations]
key = json_object_object_get(jobj, « TTL »);
^
sender.cpp:84:44: warning: ‘json_object* json_object_object_get(json_object*, const char*)’ is deprecated (declared at /usr/include/json/json_object.h:271) [-Wdeprecated-declarations]
key = json_object_object_get(jobj, « TTL »);
^
Makefile:13: recipe for target ‘sender’ failed
make: *** [sender] Error 1
J’ai cherché une mise a jour de JSON mais je n’ai rein trouvé.
bonjour a tous.
impossible de trouver le paquet libjson0-dev
pi@DashScreen:~/nrf24l01/RF24 $ sudo apt-get install libjson0-dev
Lecture des listes de paquets… Fait
Construction de l’arbre des dépendances
Lecture des informations d’état… Fait
E: Impossible de trouver le paquet libjson0-dev
Sur une Raspbian Stretch (9.6), j’ai pu régler le problème en installant libjson-c-dev au lieu de libjson0-dev en en changeant le #include du fichier sender.cpp vers
#include
et les paramètres de compilation dans le fichier Makefile en
CCFLAGS=-Ofast -mfpu=vfp -mfloat-abi=hard -march=armv6zk -mtune=arm1176jzf-s -l json-c -l rf24-bcm
Merci Nicolas ?
Bonjour,
@caux : comment as-tu résolu le problème d’installation de la librairie Json ?
Même soucie ici !
même problème ici…
Bonjour,
Qui peut préciser la manière de charger la librairie JSON? je galère….
Merci
Bonjour
Pour installer la librairie JSON, j’ai trouvé ça pour résoudre le problème :
https://github.com/emersonmello/doorlock_raspberrypi/issues/1
Par contre, l’ensemble ne marche pas… malgré la correction de pin GPIO, j’ai systématiquement un « code 5/ time out »…
Re bonjour,
Je viens de m’apercevoir que malgré l’erreur 5, la LED est bien pilotée !
Il faut insister un peu avec plusieurs commandes mais elle s’allume et s’éteint !
J’étais trop concentré sur le terminal et obnubilé par cette erreur…
Merci pour le tuto !
Très bonne mise en bouche pour la communication sans fil.
Cordialement
Hi,
Hope its ok with you I write in English. My French is not so good.
I’m trying to put nRF24 working on Raspberry Pi/node red. In node red it shows working in the flow bu can’t communicate at all with my sensor deployed in Arduino.
Then, decided to follow your good example/project.
Everything went ok till :
cd ~/nrf24l01
Copier les fichiers “Makefile” et “sender.cpp” que vous trouverez dans le ZIP “nRF24L01_Raspberry” en bas de ce tutoriel.
Compiler le fichier à l’aide de la commande « make »
$ make
I’ve copied file to Raspberry Pi and when doing « make » I got the following message :
« g++ -o sender -Wall -I../ sender.cpp -Ofast -mfpu=vfp -mfloat-abi=hard -march=armv6zk -mtune=arm1176jzf-s -l json -l rf24-bcm
sender.cpp:7:10: fatal error: json/json.h: No such file or directory
#include
^~~~~~~~~~~~~
compilation terminated.
make: *** [Makefile:13: sender] Error 1 »
Can you help ? How can I proceed ?
Thanks
JS
$ sudo apt-get install libjson0-dev
Bonjour,
Y a t’il quelqu’un qui a réussi à installer le paquet sous buster ?
Et qui a déjà utilisé un Arduino nano avec nrf24l01 intégré ?
Cordialement
Petit FeedBack
Cette article permet bien de mettre en place le spi, et la lib RF24 (attention a avoir un système a jour comme dit dans cette article perso j’ai reussi mes test sous Debian 10 dit buster)
, il convient néanmoins de faire des modification dans le code sources pour que cela fonctionne, en effet comme deja dit , la vitesse du spi max des modules nRF24 est de 10 Mhz , le plus simple reste de ne donné que 2 paramètre au constructeur « RF24(CE,CSN ) », la vitesse du spi de la Raspberry devrait ce caller a 10Mhz, , sinon il advient de le limité a 8Mhz « RF24(CE,CSN , 8000000 ) ».
2eme point important les constantes RPI_V2… peuvent poser problème sur les versions de Raspberry actuel , il est plus stable de renseigner directement le numéro GPIO a la place des ces constantes RF24(22, 0 ) » 22 pour la pin 15 et 0 pour le CE0 de la rapsberry , attention les PI 4 possèdent plusieurs SPI.
3 eme point si on suit strictement ce câblage , la communication ne pourra fonctionner si la Raspberry est émettrice que si la puissance est configurer en PA_MIN ou PA_LOW et donc a courte porté, en effet le 3.3v de la Raspberry ne peut délivrer que 50 mA, pour PA_HIGH il faut un peut moins de 1A en crête d’émission et pour PA_MAX il faut plus de 1A . Pour utiliser la Raspberry en Émettrice longue porter , il faut donc un 3.3v externe ( 5v ne fonctionnera pas ) (GND commun)
4eme point pour les version nRF24l01+ bien inclure dans le code en plus de #include le #include
si certain ça peut aidée voici le git de mes testes : https://github.com/jeromefavrou/rtr_nRF24
merci Jérôme